Just double-checking:
https://github.com/euphy/polargraph_server_a1/blob/master/polargraph_server_a1.ino#L71 is uncommented
#define SERIAL_STEPPER_DRIVERS
and lines https://github.com/euphy/polargraph_server_a1/.blob/master/polargraph_server_a1.ino#L58-L59 are commented like so
//#define ADAFRUIT_MOTORSHIELD_V1
//#include <AFMotor.h>
And in configuration.ino, this https://github.com/euphy/polargraph_server_a1/blob/master/configuration.ino#L53-L60 looks like
#define MOTOR_A_ENABLE_PIN 8
#define MOTOR_A_STEP_PIN 2
#define MOTOR_A_DIR_PIN 5
#define MOTOR_B_ENABLE_PIN 8
#define MOTOR_B_STEP_PIN 3
#define MOTOR_B_DIR_PIN 6
The notes on that diagram do indicated that the lines should start with #DEFINE rather than #define, but if it's compiling, I'll assume you spotted that!
If all that's in order, and the firmware is uploaded. Then Kongorilla's path should work.
Pop open the console (Ctrl+C, or you can just look at the black-and-white bottom half of the IDE if you are running the controller from source code.
On the SETUP tab, click "upload machine spec" and watch what happens. You may see some obvious errors. (There might be one about PG--somethingXX, you can ignore it.)
Second thing: When the machine starts up, it prints out a summary of it's own settings from EEPROM. Have the console up, and reset it, and show us a screen grab of what comes up.
One last thing - you say servo and stepper and I'm not sure quite which is not working. Does anything move?
sn
|

 Author
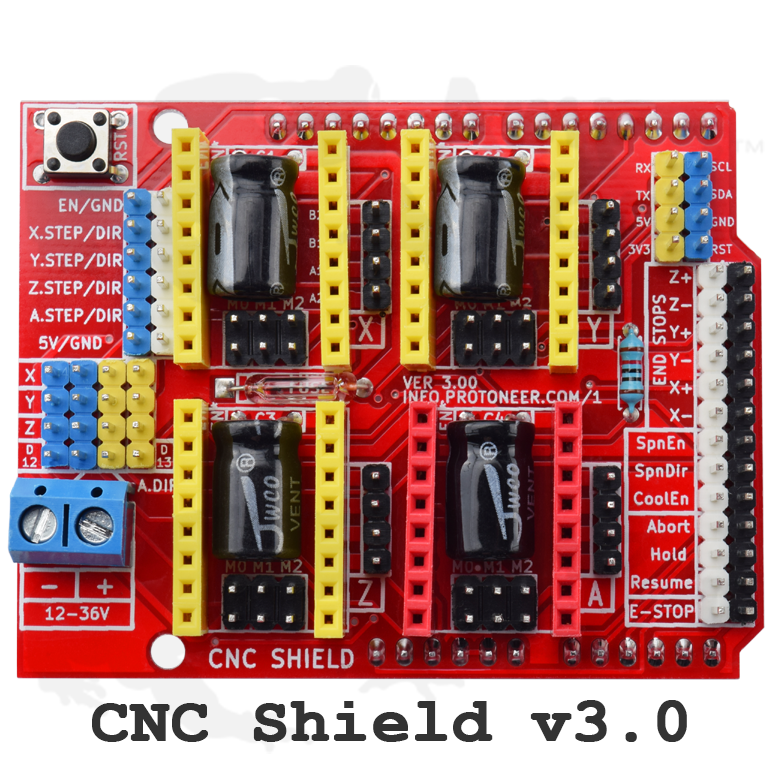
Author Servo control with a CNC shield v3 and UNO
Servo control with a CNC shield v3 and UNO