hello you wonderful and deeply creative people.
I have come to this forum for your aid and input on my current project for my university.
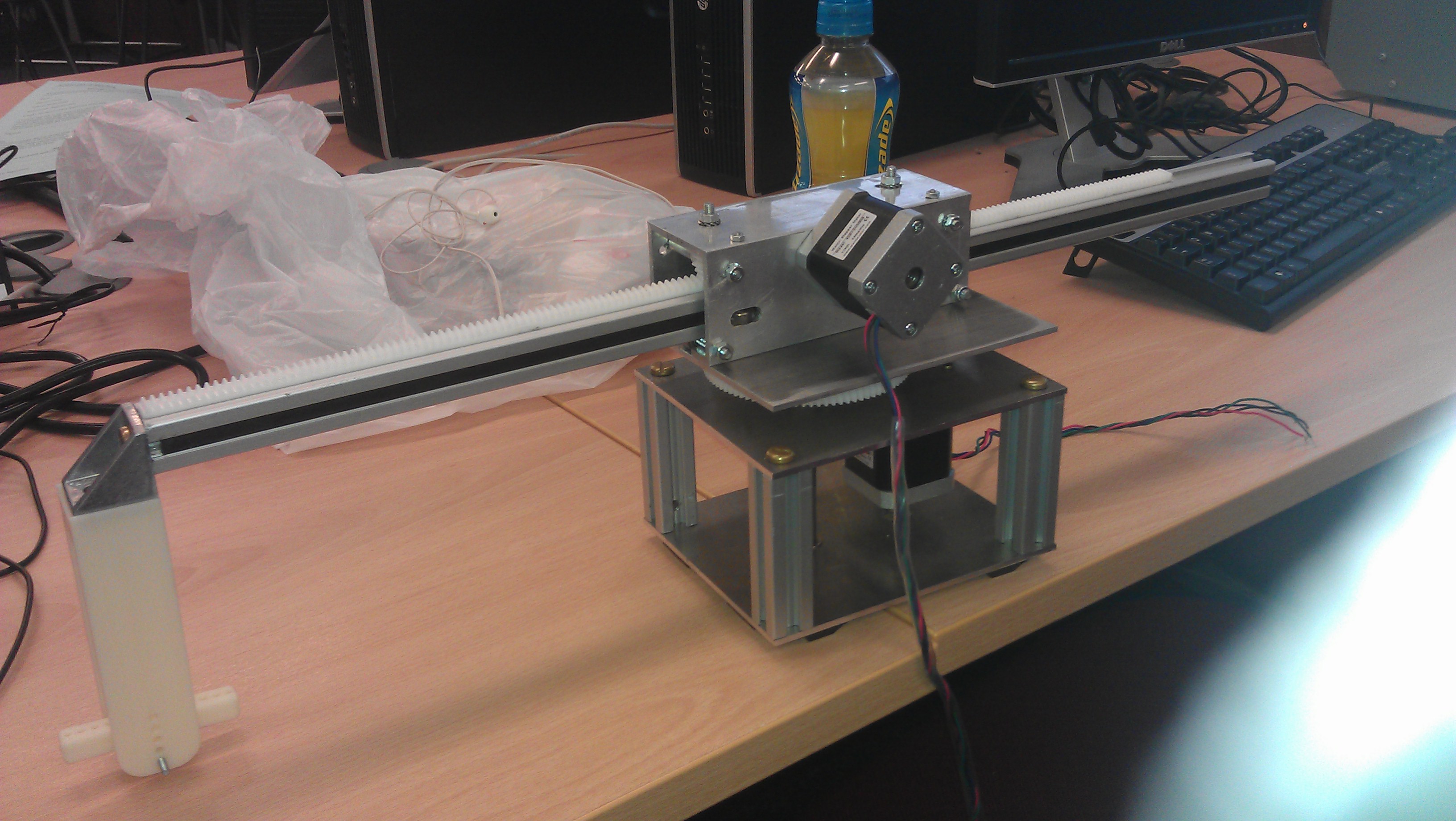
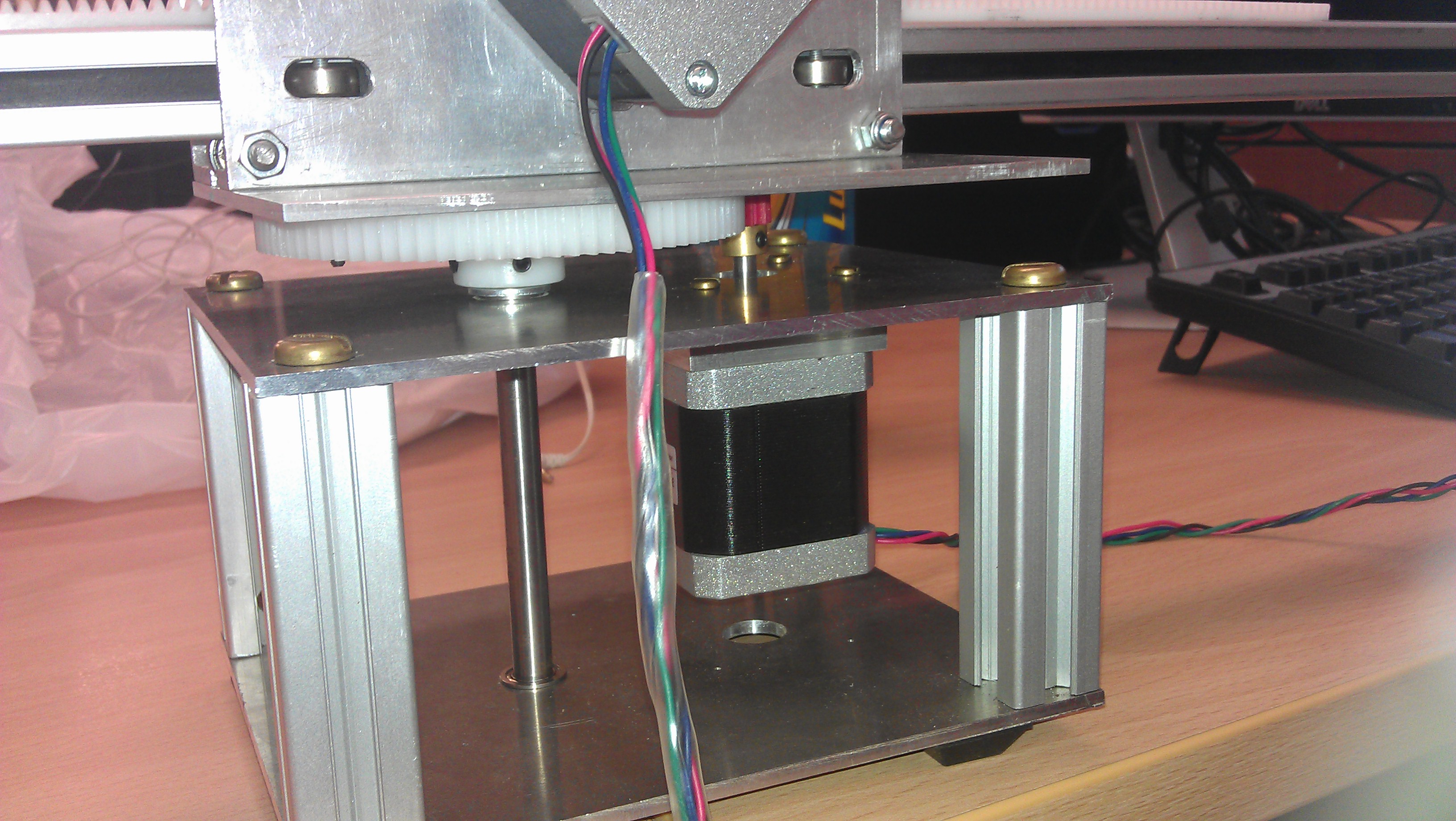
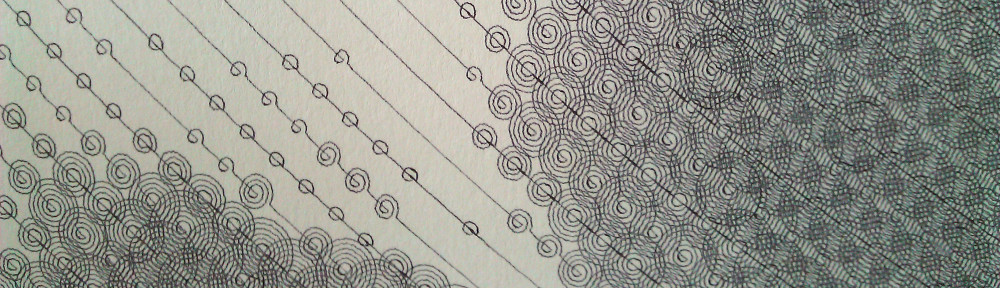
the aim is simple. to produce a robotic artist able to interpret an image and draw it.
now while for the project I could have produced a simple cartesian plotter I made decision to produce a polar plotter. showing a novel solution to the task.
deeply similar to this project http://roxen.github.io/polar-plotter/ but the aim is to produce a much more comprehensive form of image and hopefully with a much more accurate drawing capability and higher resolution.
within the project description it also outlined that the plotter should have the capability to vary the pressure of the drawing implement allowing for possibilities of shading.
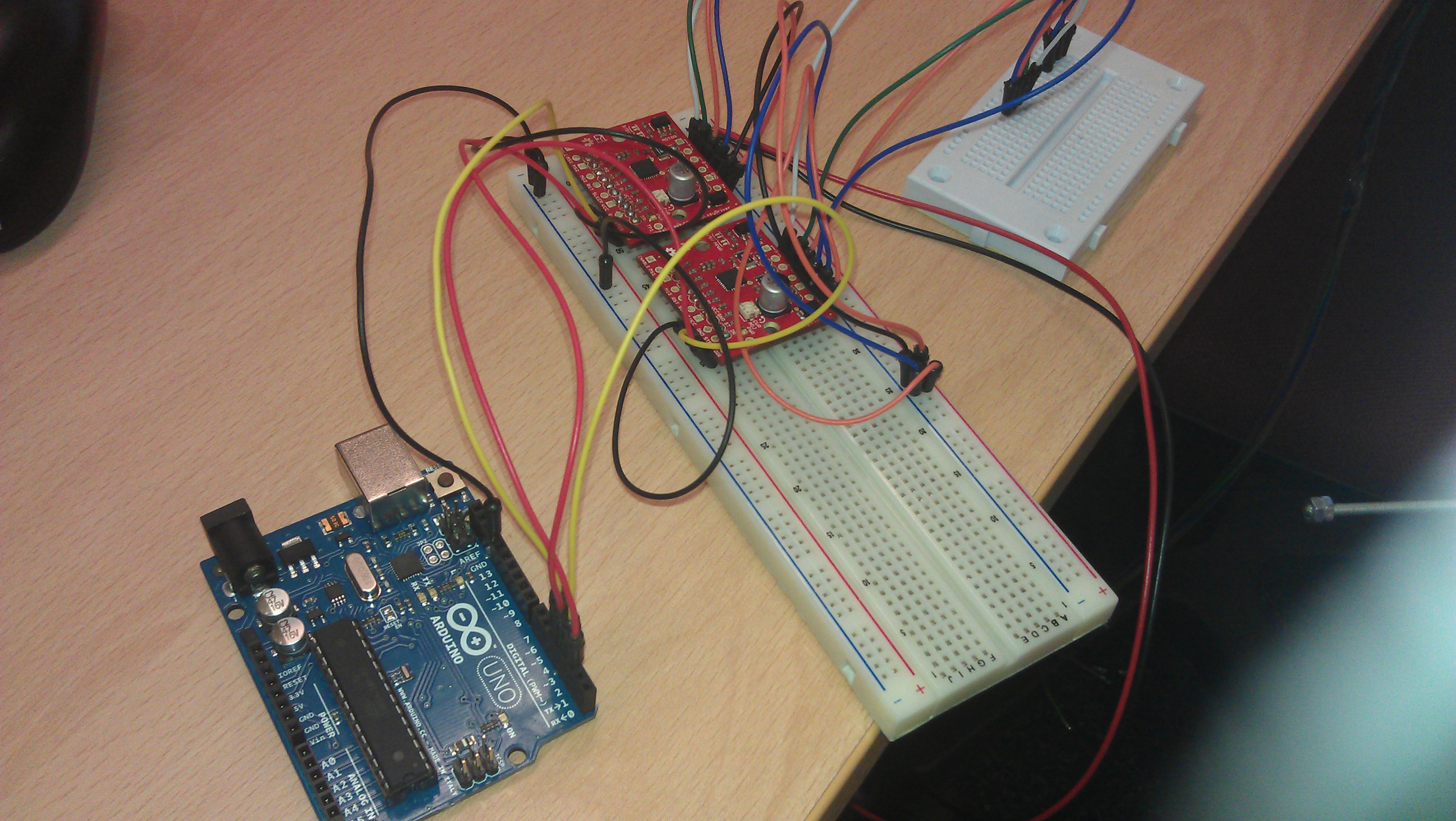
this is where you fine ladies and gentlemen come in. I have produced a working mechanical prototype that I have been able to get to move and draw deeply simple shapes simply by giving the arduino step instructions. what I need to work on now is a system of taking an image and producing the suitable instructions to drive the stepper motors and arduino.
the Polargraph robot is amazing and I have already looked through the source code and controller code however I am not too hot on programming and have no experience with processing as a system. would any of you be able to give me some advice or guidance in either producing a similar system myself that I can use with my current build or instruct me on how I would go about modifying the current control system to utilise my hardware?
thank you very much in advance. all advice and comments regarding the system will be heavily referenced within my summary paper if you so wish 🙂
more pictures for those who wish
http://imgur.com/APTkMMt,6N0kyTx,7qD8355,NuMYlmF,PgvciKp#4
|
 Author
Author polar plotter: AKA leonardo the robotic artist.
polar plotter: AKA leonardo the robotic artist. 