Hi! This seems like an entirely different problem.
One thing - if you have the Arduino IDE open, with the serial port, you won't be able to connect the Polargraph controller.
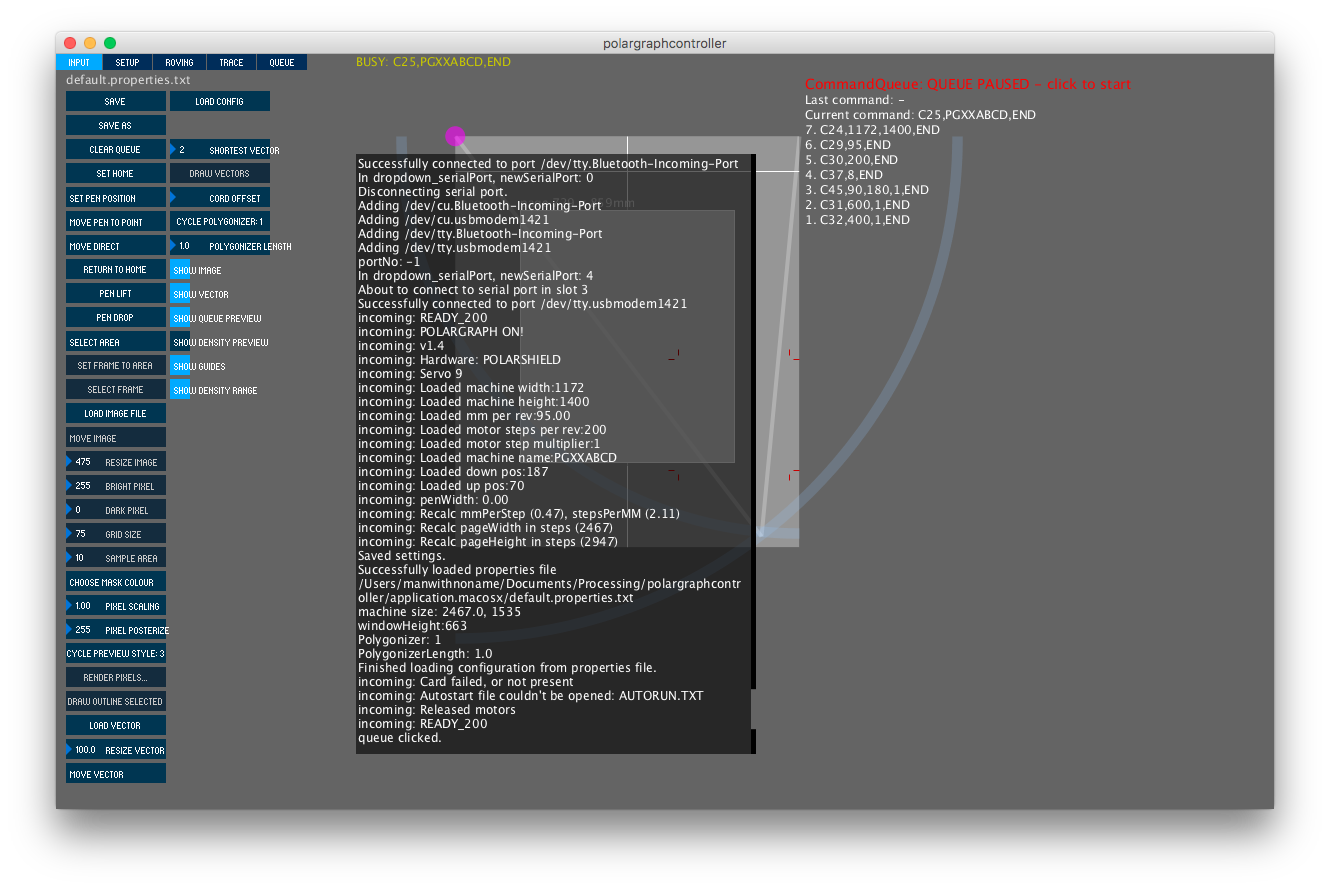
What you _should_ see when you C02,0.8,END (make sure you have line endings set to "new line") is a response resembling "Changed pen width to 0.8mm", followed by "minimum grid size is ...".
If you don't, something is up. The snippet you posted doesn't ring true either - though I couldn't get your image to load ("web server is down" message).
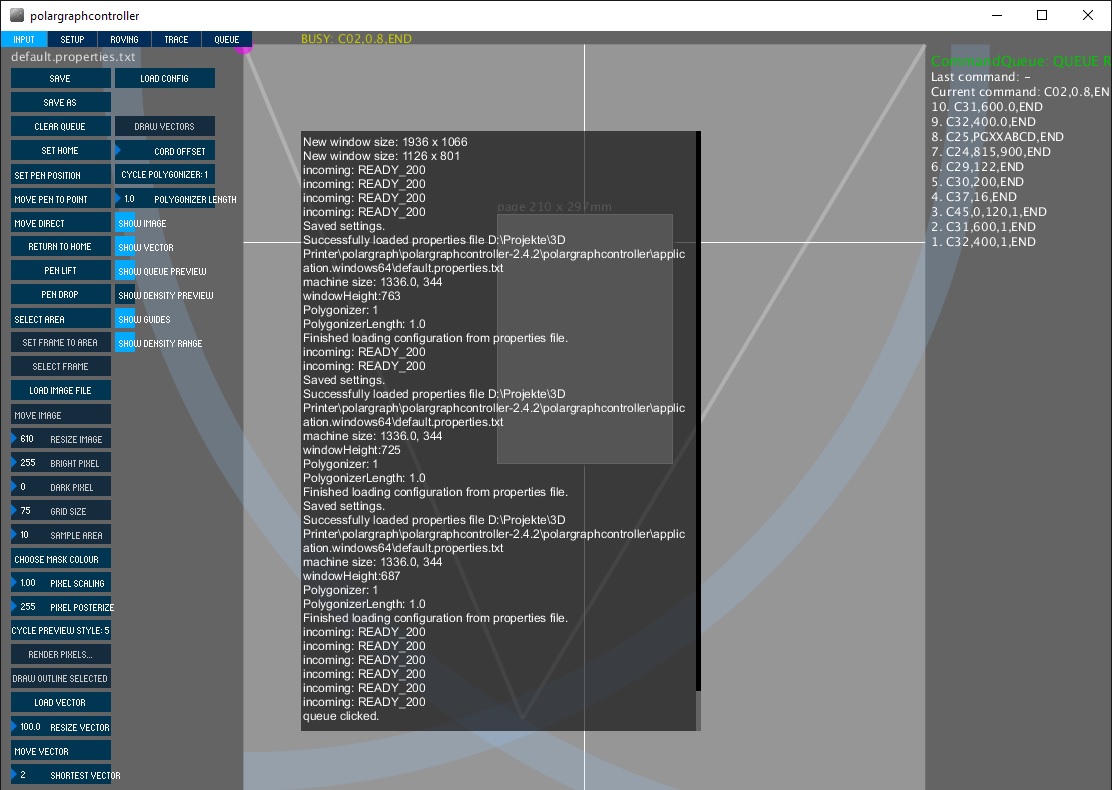
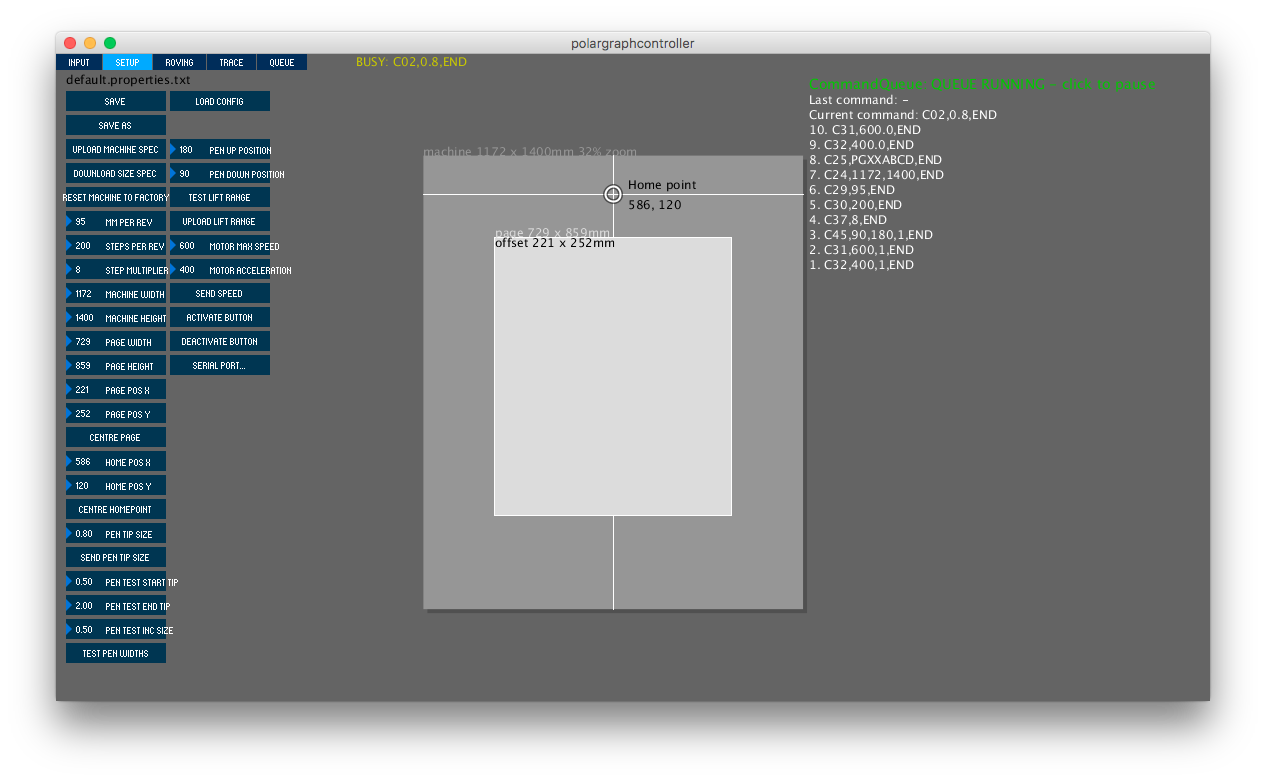
Pen width is 0.0 in that startup reporting, and step multiplier is 1 as well, so I don't think the machine spec upload has worked entirely.
Can you try something for me please? In the serial monitor, enter C27,END and see what happens. You should see the machine spec being read back to you, full of zeros. Then try the upload machine spec again.
I've had a couple of problems lately with upload machine spec, so I'm working on some improvements to that section, and might ask you to reflash with a new firmware soon!
sn
|
 Author
Author Busy message after initiating controller...
Busy message after initiating controller...