Alpal, welcome to the board 🙂 Sorry to redirect you earlier!
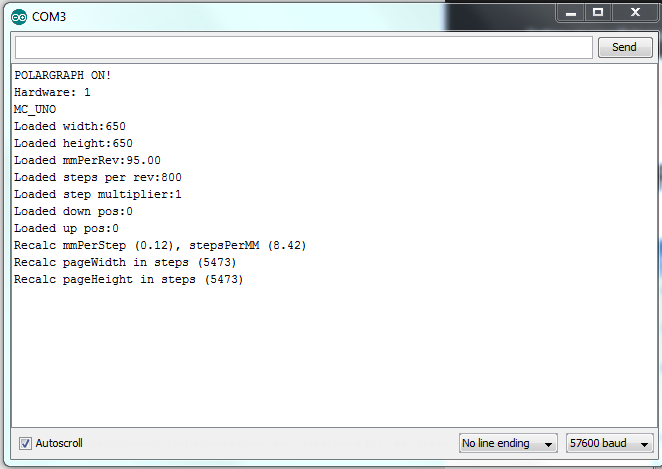
Reconlab has got one thing right, and that is that your upload _has_ worked.
For the controller to connect to the machine, the machine needs to be sending out the READY messages. The fact that is is not is why the controller won't connect. You knew this already! 🙂
It is nothing to do with the current the motors are receiving. As you know, there is no power adjustment on the motorshield.
I've seen this kind of problem before, but it's usually to do with the board running out of dynamic memory as it boots. However, when I try to compile polargraph_server_a1 for the duemilanove board (the seeeduino is a version of the duemilanove), I cant: There isn't even enough space to upload the code, never mind boot! I don't support Duemilanove boards any more.
So did you turn off a couple of features to get it to compile?
Reconlap is right about the motor testing too. You could try one of the Adafruit motorshield example sketches to test whether the motors are working themselves. Not sure if you've already done that - but if not, you should!
Sandy Noble
|
 Author
Author Getting started
Getting started