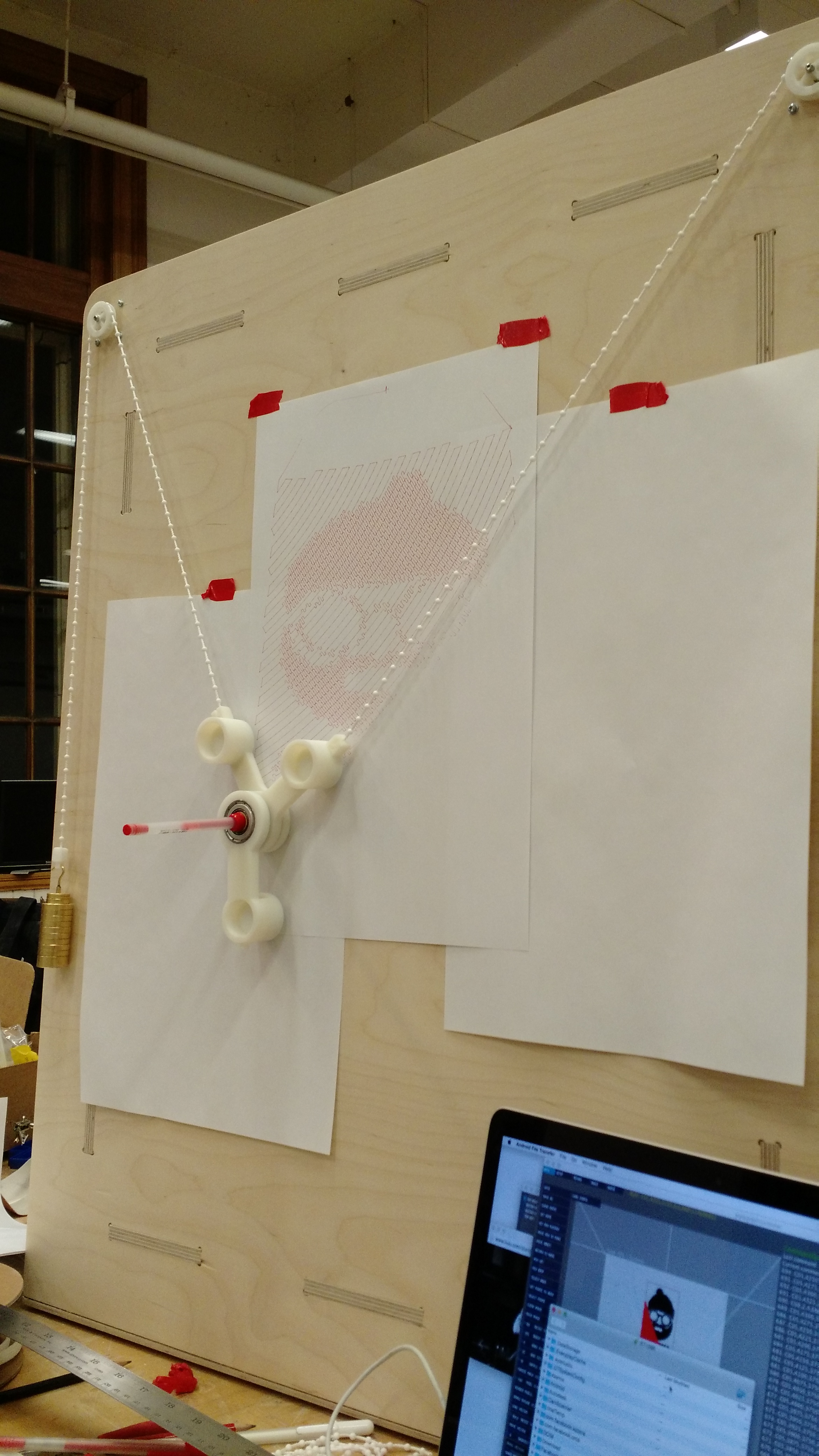
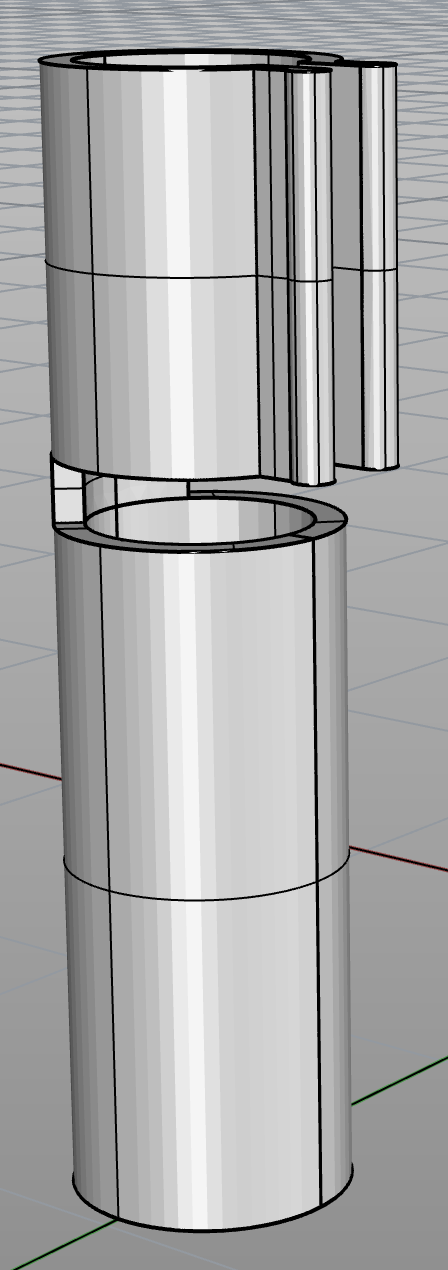
Hi Andrew, welcome, that's a pretty sweet looking plywood machine you've got there! CNC milled? I'm jealous.
You don't mention which motor driver you're using, so I'm going to assume it's an Adafruit Motorshield v1, and that you've loaded the hex firmware from polargraph_server_a1_adafruit_v1.cpp.hex.
Easy answer to your flipping question:
AccelStepper motorA(forwarda, backwarda);
AccelStepper motorB(forwardb, backwardb);
(https://github.com/euphy/polargraph_server_a1/blob/master/configuration.ino#L53-L54)
Swap the parameters of each AccelStepper constructor:
AccelStepper motorA(backwarda, forwarda);
AccelStepper motorB(backwardb, forwardb);
- The stepsPerRev should be 2x your motor step, so try 400 instead of 800 there.
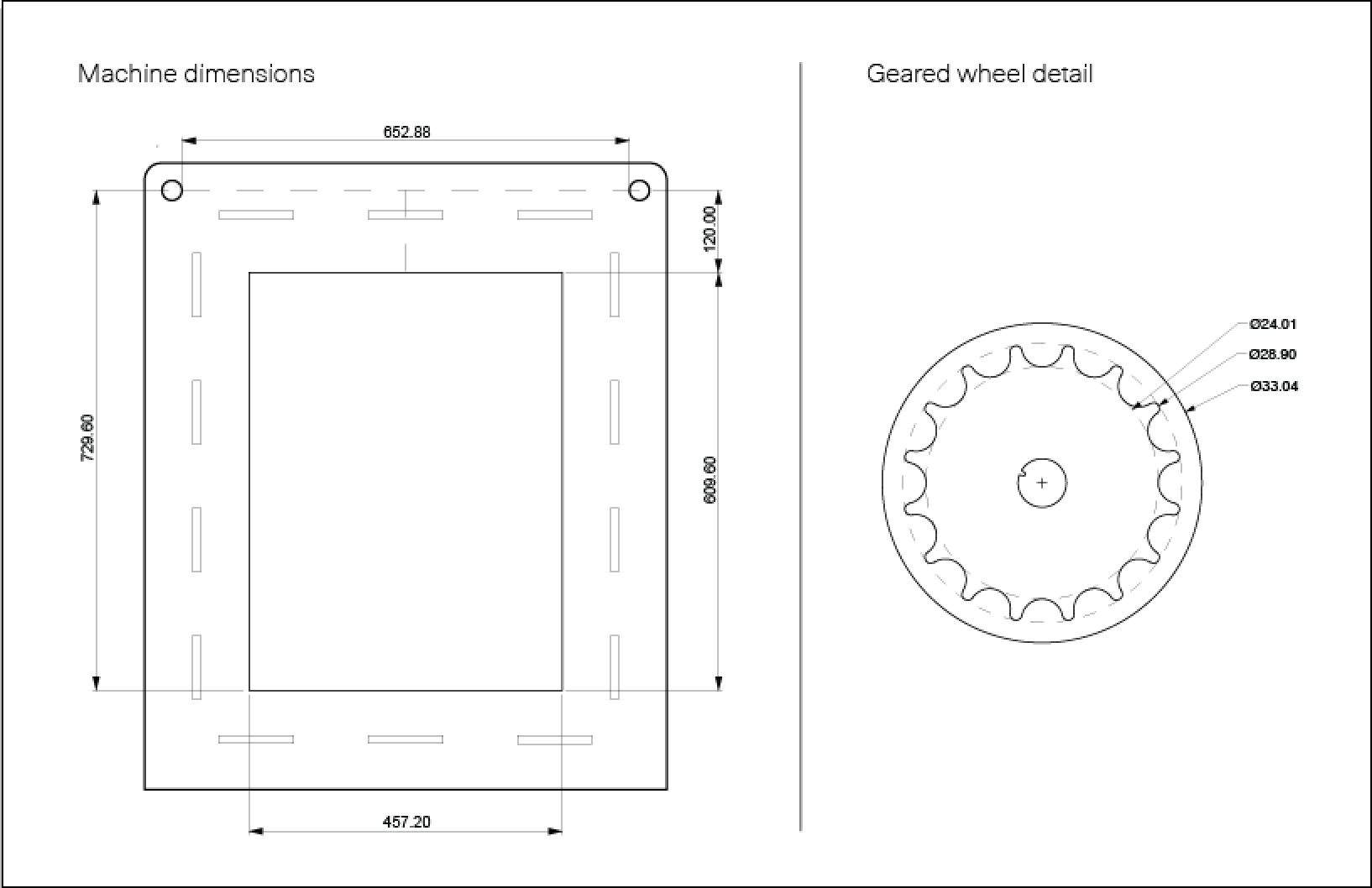
- You've got your machine width set a little wide compared to your diagram (653mm on the diagram, 658mm in the machine).
- Your mmPerRev is at least twice what it should be. This value should be the exact amount of cord that is wound off the sprocket with one revolution, with a diameter of 33, then the mmPerRev couldn't be more than 100. The exact dimension of the sprocket isn't actually that useful to measure this - better to just count the beads, and then measure a stretched piece of beaded cord with that many beads on it. I get about 93mm on mine.
When you modify these settings, you're better to close the controller, and change the default.properties.txt file directly, then reopen the controller.
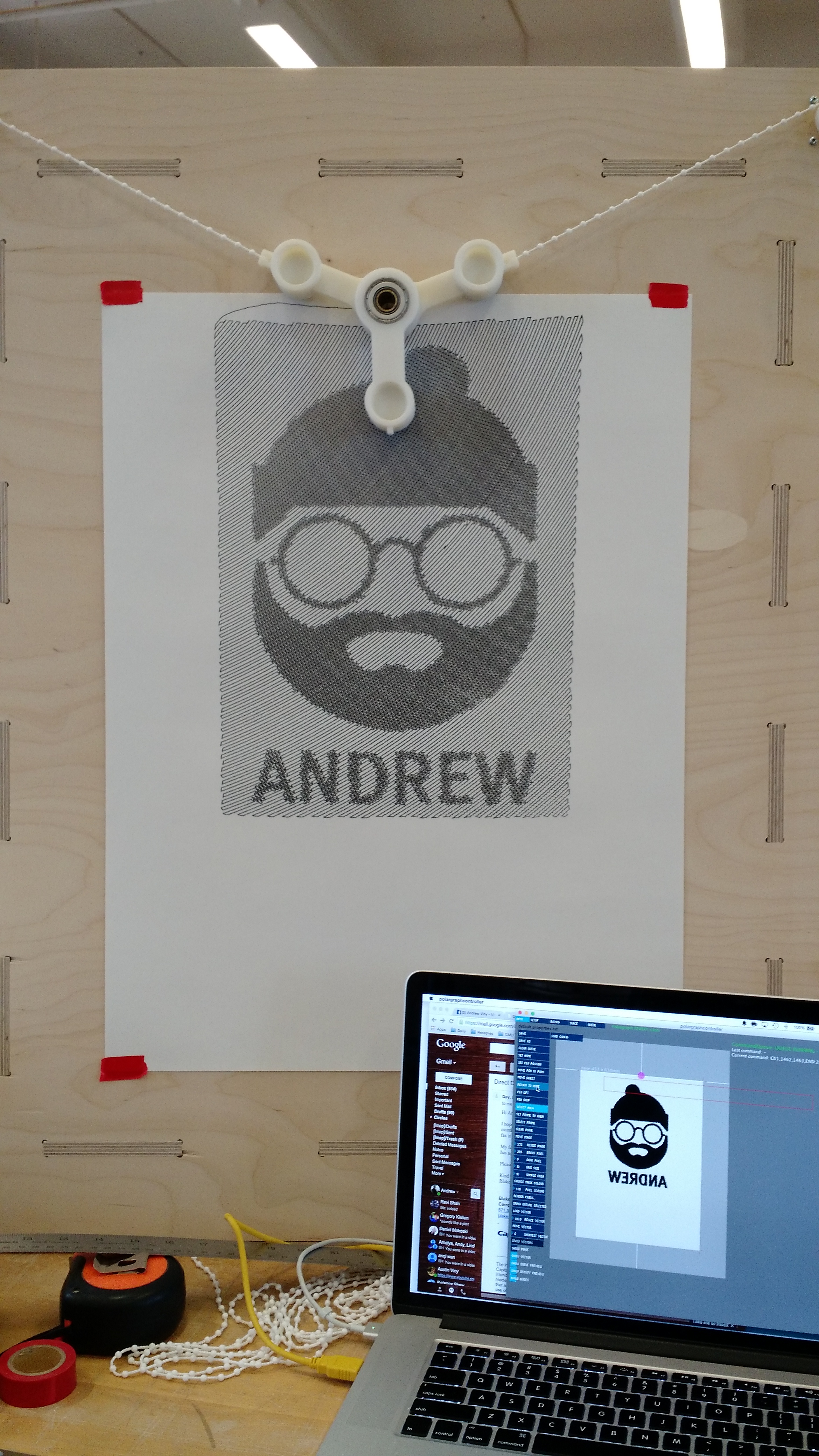
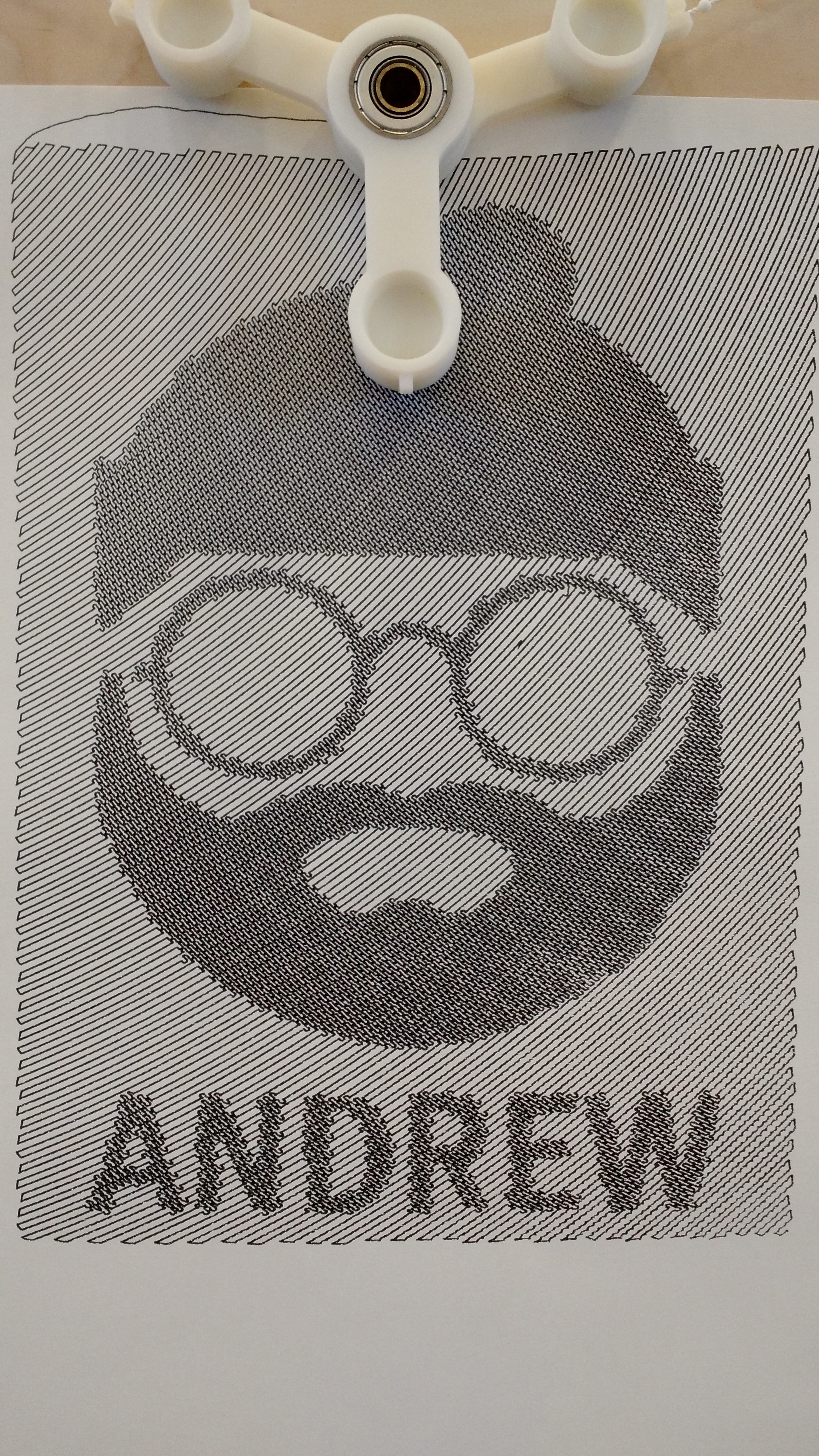
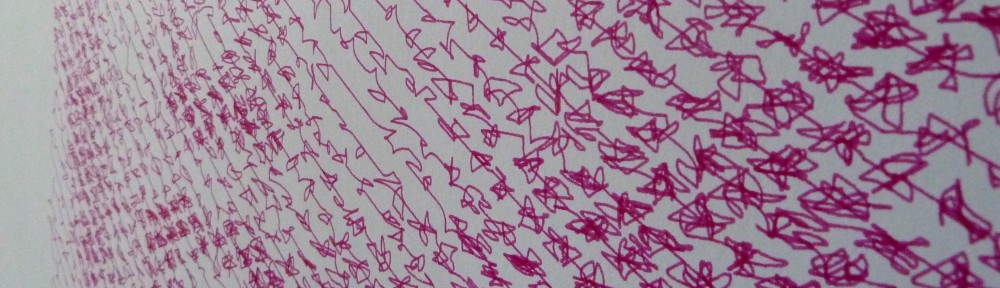
- Your home point is 262mm across, so is not in the centre. It doesn't have to be, but if there is a mismatch between what you tell the machine (when you do a "upload machine spec"), and where you physically place the pen when you do a home, it'll complain. Maybe you've already got this, because I don't see a horizontal distortion.
sn
|
 Author
Author Polargraph drawing distortion
Polargraph drawing distortion