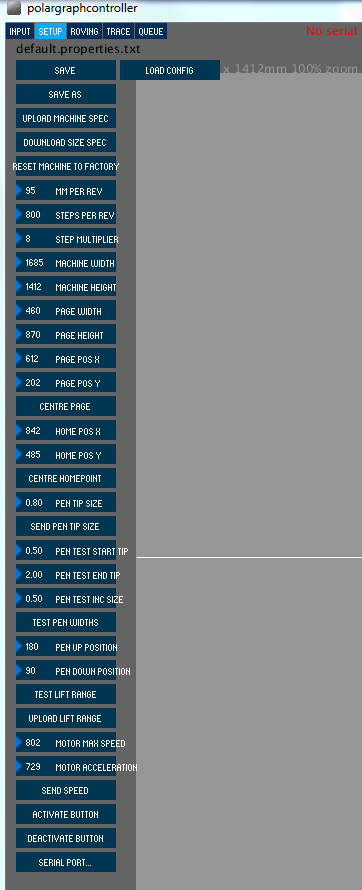
AFMSv2 is set up to use microstepping by default (https://github.com/euphy/polargraph_server_a1/blob/master/configuration.ino#L31), so I recommend
step multiplier = 16 (because the AFMSv2 has 16 microsteps per full step)
steps per rev = 400 (because your motors have 400 steps)
(On an AFMSv1, the steps per rev are doubled, because it uses an INTERLEAVED step style that effectively doubles the motor steps. You don't need to worry about this, but just to answer your question.)
Re return to home problem:
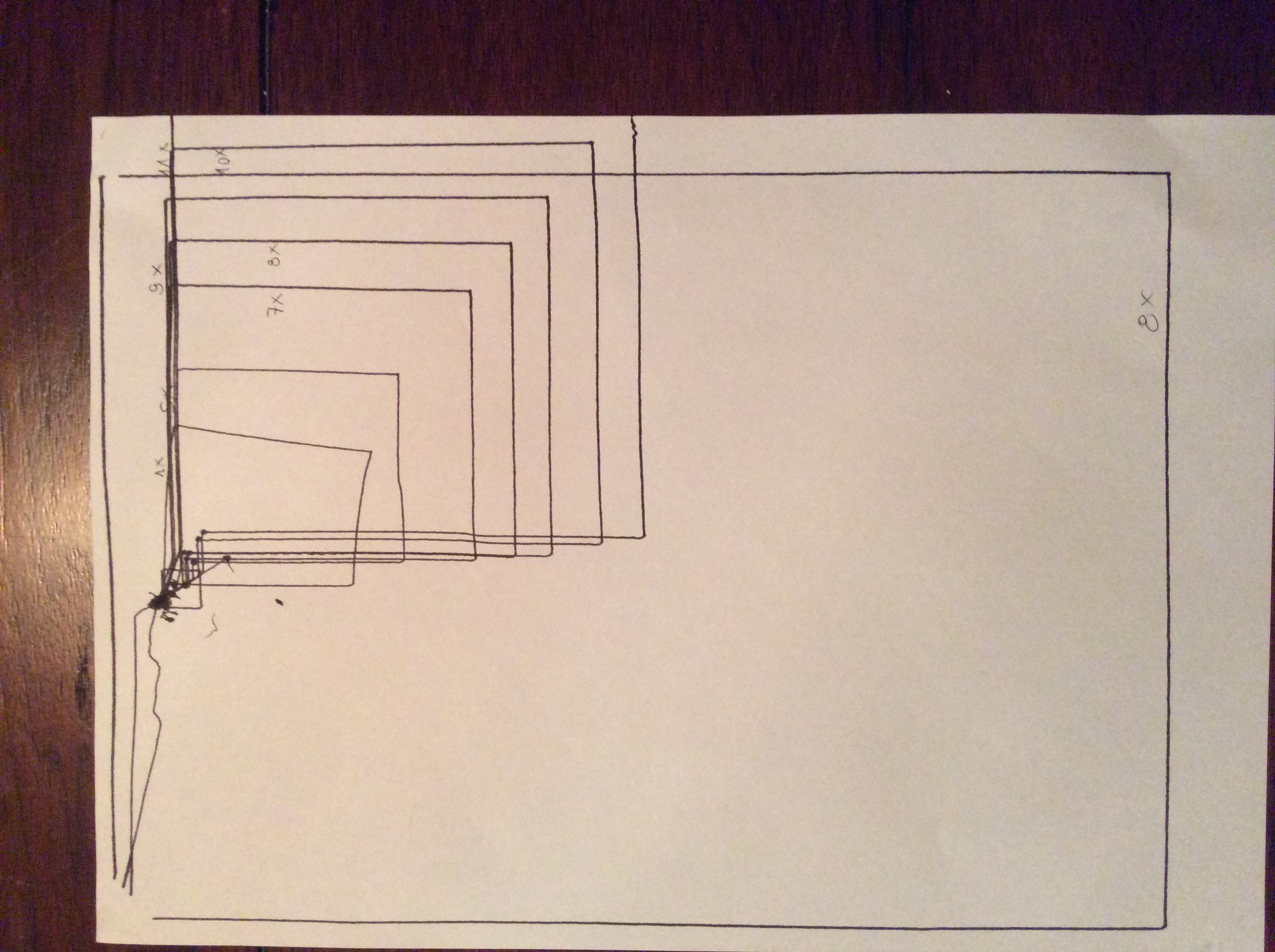
Nothing to do with your settings. Your two smallest rectangles in your test drawing are distorted - this indicates that steps are dropped during these runs, and once a step is dropped then the machine is uncalibrated. So the machine thinks the motor has moved the pen, but in fact something prevented it (physically) from doing so. Often this is a mechanical problem (pen or counterweight getting caught on something), or too much weight on either pen or counterweight. Related to the second one is torque and speed: Not enough torque or too high a speed.
Try again but at half speed. Just watch it while it's moving, and you'll normally see the erratic movements when the steps skip.
The physical cord slipping is also possible, but it's usually much more obvious, and happens in big jerks rather than this fairly subtle distortion.
sn
|

 Author
Author polargraphcontroller setup
polargraphcontroller setup