검색결과 리스트
글
제가 2011년 2월 1일 이후로 올린 포스팅에는 초반에 제 다리상태에 대한 이야기를 많이했는데요... 벌써 장마가 올거래요.. 흑흑... 이젠 2011년 전반부는 그냥 앉아서 보냈다는 말을 하게 될 것 같습니다.
어제는 저희 상무님께 식사후 상당히 화기애애한 분위기에서 말씀드렸습니다. 여기서 말하는 화기애애한 분위기란, 최근 제가 부러진 다리를 이끌고 대전까기 가서 중소기업청주관 국가과제 프리젠테이션을 했는데, 고게 합격했거든요...^^ 그러니.. 화기애애한 분위기죠.. 클클
아직 입사 6개월도 안되서 이런 말씀드리기 어렵지만, 다리가 다친 이후로 회사생활하면서 많이 피곤했고.. 또... 최근... 성과도 좀 있으니, 다리가 나으면 연차 팍팍 써서... 한 일주일 쉴 수 있을까요...
라고.. ㅎㅎ 상무님께서 쿨~하게.. 팍팍 쉬어... 라고 하셨다는... 클.... 언능 나아서.. 팍팍 1주일 쉬는 날이 빨리오기를 바랍니다.^^
오늘은 제가 입사하기 전에 이미 저희 연구소에서 만들어 놨던 건데요... 그 중 하나를 소개해 드릴려구요...^^
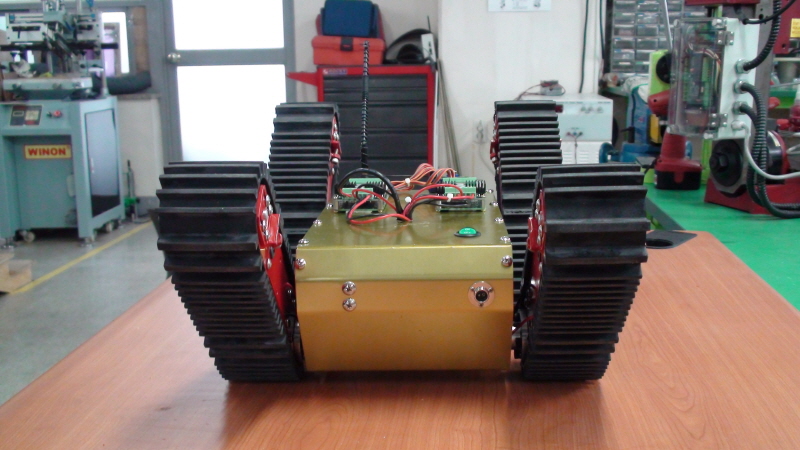
이름은 NT-Hazard Escape I 인데요.[관련페이지바로가기]
저는 저희 연구소에서 만든 기존의 작품중에서 메카넘 휠[관련글] 다음으로 신기하게 보이더군요. 이 로봇은
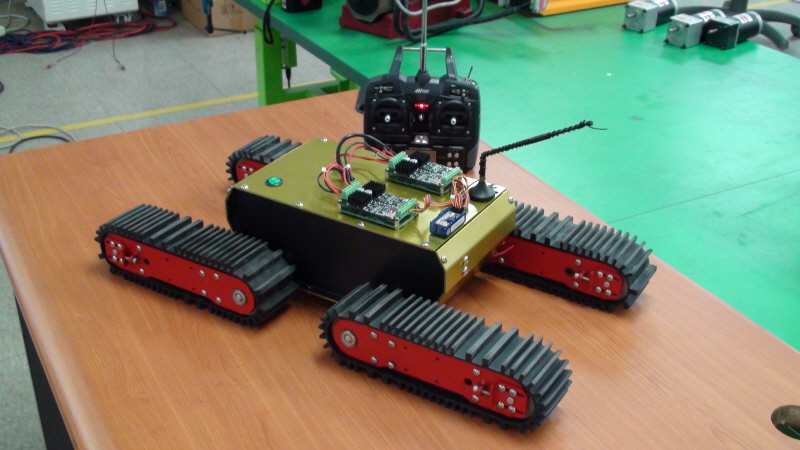
요렇게 생겼는데요. 바퀴부분이 좀 특이하죠? 이번에 새로 동작을 맞춘건 사실... 모터드라이버를 새로 장착했기 때문이랍니다.
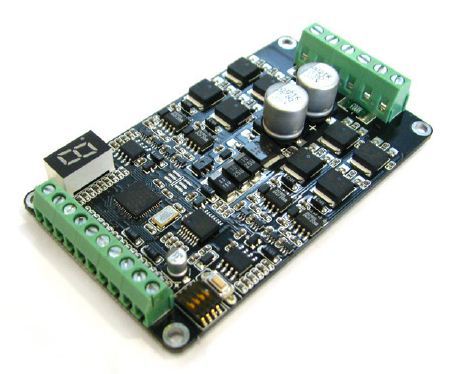
바로 NT-S-DCDM1210 [관련페이지바로가기] 이라는 DC모터 2개를 구동할 수 있는 드라이버인데요. 순간 30A, 연속구동 5A의 구동 전류까지 견딜 수 있는 작은 크기(8cm*5cm)의 모터드라이버에요. 저게 또 일반 RC 조종기와 바로 연결될 수 있도록 설계가 되어있거든요.
사실... 태생적으로 긴 바퀴가 한 축으로 물리기 때문에 저부분이 좀 상대적으로 약하긴 하지만, 일반적 구동에는 문제가 없습니다.^^
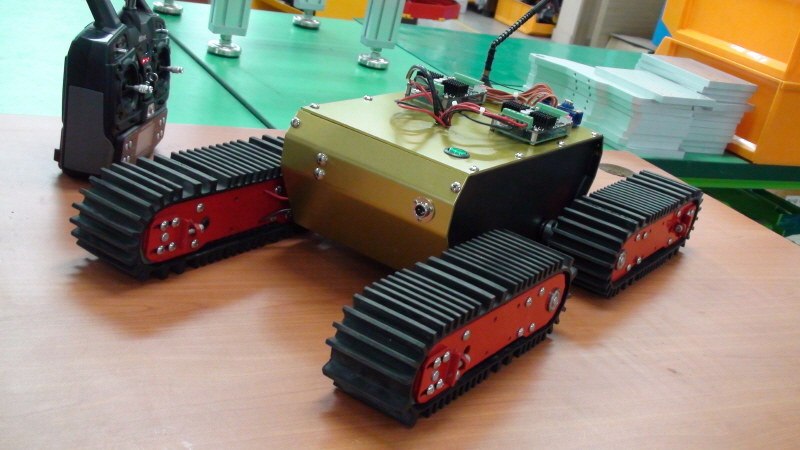
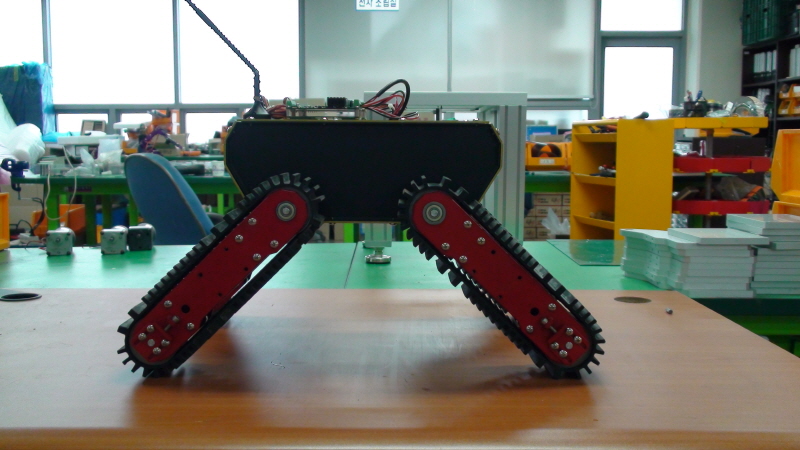
이렇게 다리를 들고도 주행이 가능하죠.. 이게 바로 이 로봇이 가지는 장점이면서 험한 지형을 주행해야하는 탐사형 로봇에 적합할 수 있습니다.
괜찮아 보이지 않나요?^^
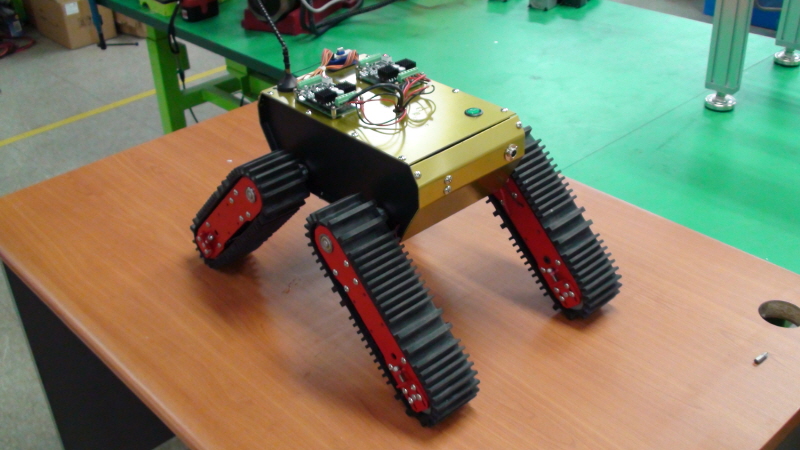
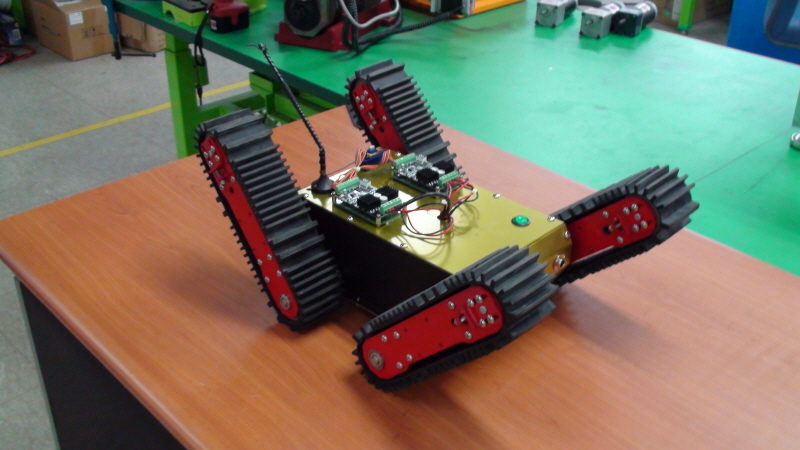
물론 이렇게 다리를 내리고도 주행할 수 있지요^^
무지막지하게 크게 만들면... 어떨까요? 클클... 하여간 실제 움직이는 건 역시.. 동영상을 보셔야겠죠?^^
이번주도 즐거운 한 주 되세용... 클^^
어제는 저희 상무님께 식사후 상당히 화기애애한 분위기에서 말씀드렸습니다. 여기서 말하는 화기애애한 분위기란, 최근 제가 부러진 다리를 이끌고 대전까기 가서 중소기업청주관 국가과제 프리젠테이션을 했는데, 고게 합격했거든요...^^ 그러니.. 화기애애한 분위기죠.. 클클
아직 입사 6개월도 안되서 이런 말씀드리기 어렵지만, 다리가 다친 이후로 회사생활하면서 많이 피곤했고.. 또... 최근... 성과도 좀 있으니, 다리가 나으면 연차 팍팍 써서... 한 일주일 쉴 수 있을까요...
라고.. ㅎㅎ 상무님께서 쿨~하게.. 팍팍 쉬어... 라고 하셨다는... 클.... 언능 나아서.. 팍팍 1주일 쉬는 날이 빨리오기를 바랍니다.^^
오늘은 제가 입사하기 전에 이미 저희 연구소에서 만들어 놨던 건데요... 그 중 하나를 소개해 드릴려구요...^^
이름은 NT-Hazard Escape I 인데요.[관련페이지바로가기]
저는 저희 연구소에서 만든 기존의 작품중에서 메카넘 휠[관련글] 다음으로 신기하게 보이더군요. 이 로봇은
요렇게 생겼는데요. 바퀴부분이 좀 특이하죠? 이번에 새로 동작을 맞춘건 사실... 모터드라이버를 새로 장착했기 때문이랍니다.
바로 NT-S-DCDM1210 [관련페이지바로가기] 이라는 DC모터 2개를 구동할 수 있는 드라이버인데요. 순간 30A, 연속구동 5A의 구동 전류까지 견딜 수 있는 작은 크기(8cm*5cm)의 모터드라이버에요. 저게 또 일반 RC 조종기와 바로 연결될 수 있도록 설계가 되어있거든요.
사실... 태생적으로 긴 바퀴가 한 축으로 물리기 때문에 저부분이 좀 상대적으로 약하긴 하지만, 일반적 구동에는 문제가 없습니다.^^
이렇게 다리를 들고도 주행이 가능하죠.. 이게 바로 이 로봇이 가지는 장점이면서 험한 지형을 주행해야하는 탐사형 로봇에 적합할 수 있습니다.
괜찮아 보이지 않나요?^^
물론 이렇게 다리를 내리고도 주행할 수 있지요^^
무지막지하게 크게 만들면... 어떨까요? 클클... 하여간 실제 움직이는 건 역시.. 동영상을 보셔야겠죠?^^
이번주도 즐거운 한 주 되세용... 클^^
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| 메카넘휠을 이용한 AGV - 라인트레이서 (12) | 2011/10/07 |
|---|---|
| [스케이트보드로봇] 구현하기... (14) | 2011/08/07 |
| 좀 큰 밸런싱 로봇 ^^ (16) | 2011/07/15 |
| 탐사형 로봇으로 이런건 어떨까요?^^ NT-Hazard Escape I (26) | 2011/06/20 |
| 메카넘 플랫폼(Mecanum Platform)으로 만드는 주행차량 (16) | 2011/06/03 |
| [스케이트보드로봇] 하드웨어 구성하기 (12) | 2011/06/02 |
| 최근에 완성한 스케이트보드 로봇 (10) | 2011/04/22 |
| [스케이트보드로봇] 시작하며... (8) | 2011/04/06 |
설정
트랙백
http://pinkwink.kr/trackback/443


와... 대단한 로봇입니다... 어려운 환경에서도 잘 적응할 것 같습니다.
잘 보고 갑니다. 기분 좋은 한 주되세요.
네.. 이번주는 정말 기분좋은 한주가 되고싶어요... ㅎㅎㅎ
몇몇 중요한 일들이 있거든요^^
좋은 한주 보내세요
우와, 동영상을 보니 정말 대단합니다.
저런 보봇이라면 탐사는 물론 못하는 것이 없을 듯 합니다.
박수~ 짝짝짝...
헉.. 박수까지...^^
그나저나... 이번주는 무지막지하게 덥다가 줄이줄창 비올 모양이에요..
그럼에도 불구하고 즐거운 한주 되세요^^
훗!
정말 ...그냥 하나 갖고 싶은 로봇인데요.^^
자세도 마음에 들고..ㅎㅎ
그런가요? ㅎㅎ..
감사합니다.
축하드려요,.,, 아픈 다리로 멀리가지 가서 쾌거를 이루고 오셨으니 사장님이 연봉 팍팍 올려줘야 한다고 생각합니다. ㅋㅋ
앗.. 안타깝게도 그건.. 제가 원래해야할 일이었으니까요...^^
우오옷!!! 멋....멋지다!!!
감사합니다.^^
축하드립니다. 몸이 불편하신 중에도 이리 성과를 거두시고.... 떨어졌었다면 상무님이 "그래 팍팍쉬어. 계속 쉬어~~ 오지마" 이러시지 않았을까 하는....ㅎㅎ
네.. 대면평가는 제가 발표한거라... 대면평가에서 떨어지면..
왠지 저의 책임이 100%인 것처럼 느껴질뻔 했습니다.^^
동영상 로봇 너무 귀여워요.
크게 만들면 살짝 무서울 것 같기도...
팍팍 쉬는 게 겨우 일주일이면 아쉽죠, 한 2주일쯤 푹 쉬다 오면 짤리나요?^^
크게만들면... 위압감이 좀 느껴질지도.. ㅎㅎㅎ
헉.. 2주라... 그건 그냥 상상속에 두도록 하죠 뭐.. ㅎㅎㅎ^^
너무 멋진데요? 저희 아이들도 아주 좋아할 것 같아요. ^^
저희 '마음세수' 출간되었습니다. 이벤트중인데요, 관심부탁드려요.
http://yemundang.tistory.com/482
공학도가 말하는 행복론이거든요. ^^
아.. 신간이벤트 중이시군요^^
이번에 꽤 신경을 많이 쓰신것 같던데 말이죠^^
다리는 이제 완전히 다 나으신건가요?
그나저나 다리를 세우고 있는거 보니까
다치코마가 생각나는데요? 자자 파란색으로 도색을!!!! ㅋㅋㅋ
ㅎㅎ 저게 스스로 애니처럼 움직이면 참 좋을텐데 말이죠^^
비밀댓글입니다
저 로봇은 약간 있어보이긴 하지만, 또 다르게 생각하면, 구조는 간편한 편입니다. 액츄에이터를 하나 구입하셔서 살짝 테스트를 해보시는것도 괜찮을 겁니다.^^
안녕하세요
제가 hazard escape에 사용된 바퀴와 모터드라이브를 구입하여 만들어 보고있습니다.
질문이 있는데 이곳에 질문을 해도 되는지요...?
네... 그러나 단종되어있는 제품이라 뭔가 안맞는것도 있답니다
트랙과 액츄에이터들은 구할 수 있을거지만
브라켓등은 메뉴얼상 명시가 되었지만
사실... 그 제품 전용으로 지금은 단종된 것들입니다.
(뭐 제품이 단종되었으니까요)
도움이 되지 못해 죄송합니다.
아 그렇군요..이미 트랙과 액츄에이터, 모터드라이브를 구입하여 만들고 있습니다.
동영상에서 보면 조종기를 가지고 로봇을 움직이는데 zigbe를 이용한 것인가요?
저희가 zigbe모듈을 사놓긴 했는데 어떻게 사용하여 R/C모드의 모터드라이브에 신호를
줘야하는지 모르겠어서요.. ATMEGA를 통해 드라이버의 ch1, 2에 신호를 주는 건가요??
네.. 저는 그와같은 부분은 잘 모른답니다.ㅠㅠ.
블로그를 보시면 아시겠지만, 전 그부분이 아니라서..^^
지그비는 지그비의 제조사 메뉴얼을 보시는게 더 나을듯합니다.
일반적 통신을 그냥 무선으로 대체해주는 거라고 알고있는데요.
지그비 자체의 설정을 제외하면
통신자체는 어렵지 않다고
귀동냥으로만 알고 있습니다.
저도 모터드라이버를 이용해 자동차를 구동하려고 하는데 이 모터드라이버 인테페이스와 아두이노를 연결하려고 하는데 구체적인 연결구도나 정보를 쫌 얻을수 있을까용 ?? ^ ^
네.. 아두이노와 본 제품을 연결하실려면 제일 편한건 시리얼통신을 이용하는 겁니다.
http://pinkwink.kr/574
이 글에서 비슷한 상황을 이야기 했는데요. 아두이노 버젼에 따라서는 UART를 연결하셔야 할 수도 있구요. 그렇다면 또다른 어댑터(UART to RS232)가 필요합니다.
만약 아두이노의 RS232가 되는 단자에 연결하신다면 그냥 모터드라이버와 연결하시면 되구요.