Hey up, yes it is a bit wiggly eh. Kong you're absolutely right that there is a max line length value. It can be set either in the properties file directly (can't remember the name of the key exactly, but will be something clever like vector.line.length.max) or by using '<' and '>'. Press 'i' to display the debug overlay and it'll list the current setting, alternatively, it's the last number in the command, so "C17, 1234, 5678, 10, END" would be drawing a straight line to coordinates 1234, 5678 and split the line into segments of no longer than 10 motor steps. It'll help you.
I admit I don't know why I set the initial value to be anything other than 2. I don't see any difference between 1 or 2.
The theory is that higher values will be faster but coarser. In practice, I've never used anything except the lowest settings.
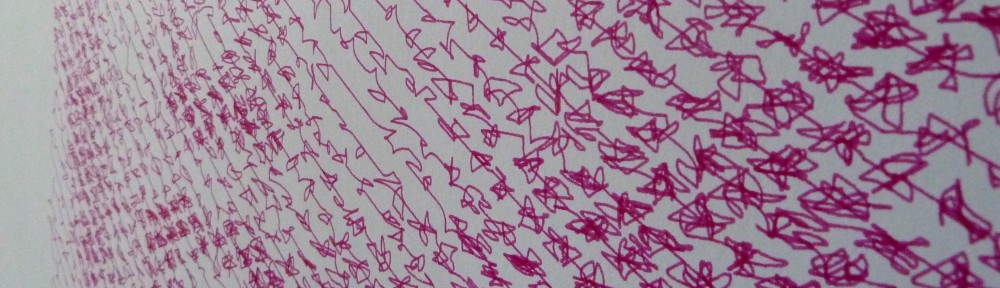
It doesn't sound nice at all because it's all composed of tiny little bitty lines so acceleration doesn't work. For C17 I circumvented acceleration so it runs at full speed all the time otherwise it really was so slow. I would like to make this smoother, implement proper acceleration for curves and things, rather like the reprap hardware does it (marlin), but for the time being I can't get my head around the maths involved - beyond me.
The staccato nature of the movement means that the pen line is pretty rough too, I'm not greatly impressed for closeup stuff. Lower speed will help here, and also, dare I say it, microstepping. Not necessarily for positioning, but for movement from step to step - it would just smooth it out a bit. Will try some experiments on that later this week.
sn
|
 Author
Author My First Vector Drawing
My First Vector Drawing