Dear Sandy,
to start with: many thanks for your great work!! I built a (maybe bit to huge - machine width is 1806mm 🙂 machine over the past weeks following your brilliant instructable and those manymany hints of forum members (highly appreciated as well!).
My machine works with an arduino MEGA and a adafruit motorshield v2.3. with latest firmware and server version directly from sandy's github. My steppers are NEMA with 200 steps per turn and I am really overwhelmed by the precision of this huge thing. My main usecase will be (at least in the beginning) to draw vector graphics. So, both steppers work fine and precise (I also tried SINGLE and DOUBLE mode of steering the steppers, I did like the reduced noise but disliked the reduced precision), also there seems to be no communication problem between the MEGA and my iMac.
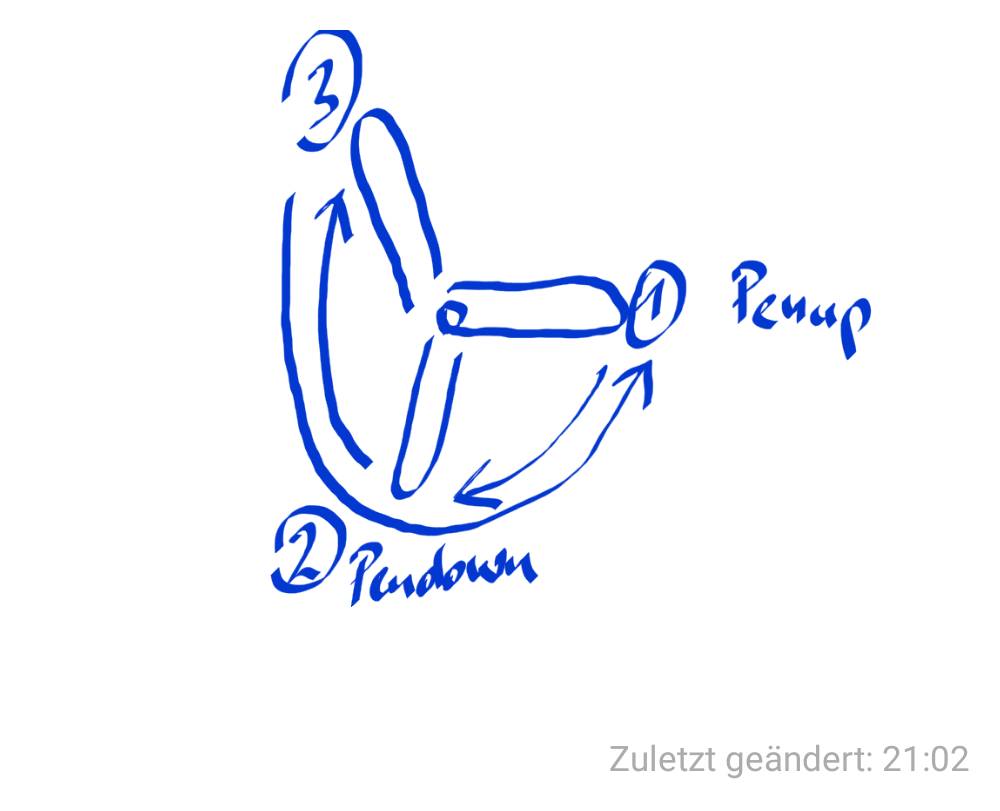
I have a really strange problem: My Servo does not what it should do. PenUp/Pendown does mostly not do a thing. I tried to modify the angle settings and uploaded them to the Arduino, it anyhow mostly doesnt move. Sometimes it makes small movements like 10 Degrees (although settings would indicate much bigger movements, which are not enough to lift the pen enough), most of the time the servo does not react at all. I cannot understand under which conditions a small movement of the servo happens, mostly there is no movement when ther should be one.
I thought that the servo type I used had a problem (which is not a continous rotation model or a digital servo)., so I tried another one from a different company. Same Picture. Then I tried a different motorshield (but still adafruit v2.3). Did not help. I then downloaded from the Arduino examples the sketch "sweep" and... it worked with both servo types sweeping out of a sudden without changing wiring
Any ideas how i could narrow down the problem a bit more? Could I activate specific servo monitoring options?
I feel very close to a fully working machine, but could not find the problem keeping me from final success, thanks in advance for hints or ideas on that topic!!
|
 Author
Author Strange problems with servo
Strange problems with servo