Okay I re-uploaded my machine specs to the Uno - still taking an incredible long time to move the pen to certain points on the drawing surface. Here is a screenshot of my "setup" tab in the controller software
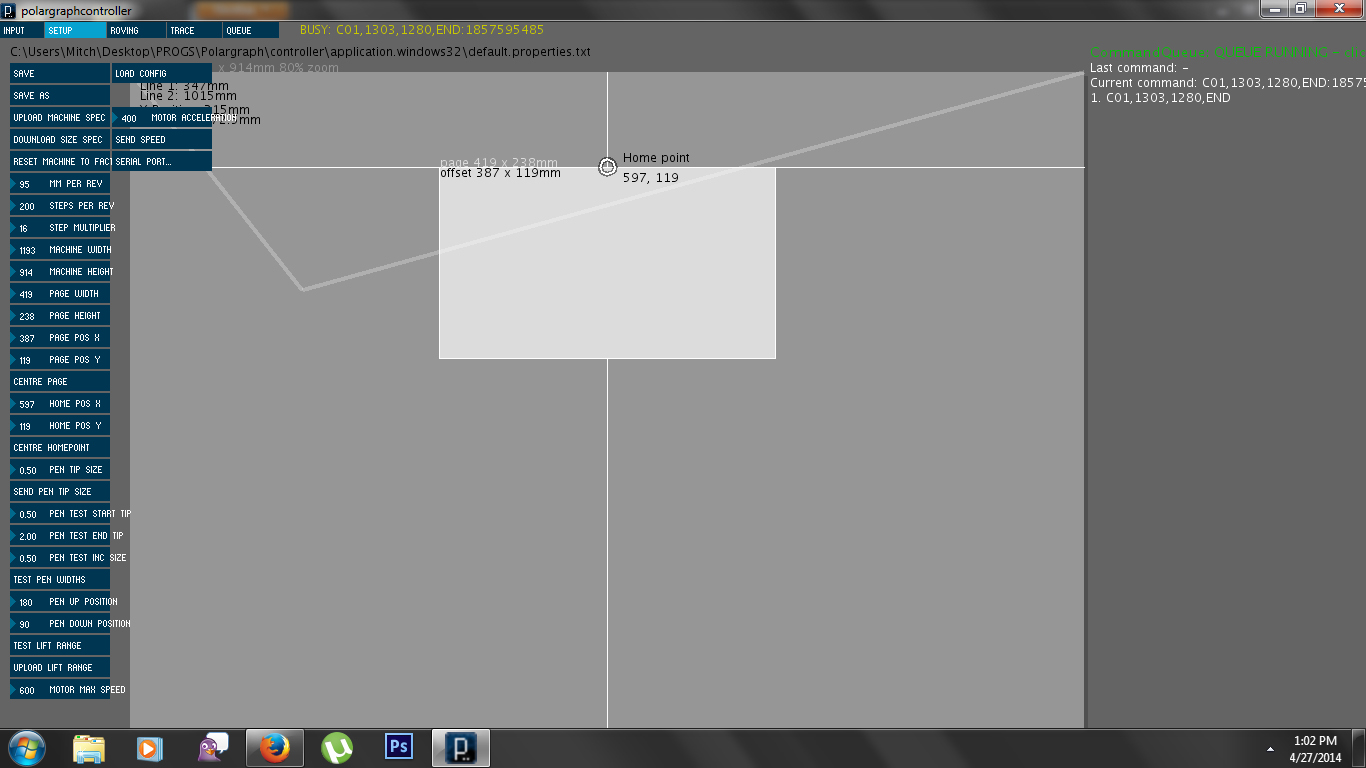
Seeing that it's taking 3200 steps per rev - I think that the machine is seeing & moving way more then it should be per rev, but paradoxically we're trying to get it to "microstep" properly by adding more steps per rev, it seems like the machine is making more full 360 degree revolutions than dividing them up in between steps - I don't know if that makes sense, but just telling the machine to move to the home point can take up anywhere between 1-3 minutes!
Small update: I think this could be an issue in the firmware; I actually switched to micro-stepping in the firmware and the motors run incredibly smoother now, however it still takes the machine a very long time to rove to points on the drawing surface: here is my firmware code below, please review:
Polargraph_server_a1
* Polargraph Server for ATMEGA328-based arduino boards.
* Written by Sandy Noble
* Released under GNU License version 3.
* http://www.polargraph.co.uk
* http://code.google.com/p/polargraph/
The program has a core part that consists of the following files:
- comms.ino
- configuration.ino
- eeprom.ino
- exec.ino
- penlift.ino
- pixel.ino
- util.ino
and the first portion of the main file, probably called
something like polargraph_server_a1.ino.
CONFIGURATION!! Read this!
==========================
Kung fu is like a game of chess. You must think first! Before you move.
This is a unified codebase for a few different versions of Polargraph Server.
You can control how it is compiled by changing the #define lines below.
Comment the lines below in or out to control what gets compiled.
*/
// Turn on some debugging code
// ===========================
//#define DEBUG
// Program features
// ================
//#define PIXEL_DRAWING
#define PENLIFT
#define VECTOR_LINES
// Specify what kind of motor driver you are using
// ===============================================
// REMEMBER!!! You need to comment out the matching library imports in the 'configuration.ino' tab too.
#define ADAFRUIT_MOTORSHIELD_V2
//#define ADAFRUIT_MOTORSHIELD_V1
#include <AccelStepper.h>
#include <Servo.h>
#include <EEPROM.h>
#include "EEPROMAnything.h"
/* ===========================================================
These variables are common to all polargraph server builds
=========================================================== */
const String FIRMWARE_VERSION_NO = "1.7";
// for working out CRCs
static PROGMEM prog_uint32_t crc_table[16] = {
0x00000000, 0x1db71064, 0x3b6e20c8, 0x26d930ac,
0x76dc4190, 0x6b6b51f4, 0x4db26158, 0x5005713c,
0xedb88320, 0xf00f9344, 0xd6d6a3e8, 0xcb61b38c,
0x9b64c2b0, 0x86d3d2d4, 0xa00ae278, 0xbdbdf21c
};
static boolean usingCrc = false;
// EEPROM addresses
const byte EEPROM_MACHINE_WIDTH = 0;
const byte EEPROM_MACHINE_HEIGHT = 2;
const byte EEPROM_MACHINE_MM_PER_REV = 14; // 4 bytes (float)
const byte EEPROM_MACHINE_STEPS_PER_REV = 18;
const byte EEPROM_MACHINE_STEP_MULTIPLIER = 20;
const byte EEPROM_MACHINE_MOTOR_SPEED = 22; // 4 bytes float
const byte EEPROM_MACHINE_MOTOR_ACCEL = 26; // 4 bytes float
const byte EEPROM_MACHINE_PEN_WIDTH = 30; // 4 bytes float
const byte EEPROM_MACHINE_HOME_A = 34; // 4 bytes
const byte EEPROM_MACHINE_HOME_B = 38; // 4 bytes
const byte EEPROM_PENLIFT_DOWN = 42; // 2 bytes
const byte EEPROM_PENLIFT_UP = 44; // 2 bytes
// Pen raising servo
Servo penHeight;
const int DEFAULT_DOWN_POSITION = 90;
const int DEFAULT_UP_POSITION = 180;
static int upPosition = DEFAULT_UP_POSITION; // defaults
static int downPosition = DEFAULT_DOWN_POSITION;
static int penLiftSpeed = 3; // ms between steps of moving motor
byte const PEN_HEIGHT_SERVO_PIN = 9;
boolean isPenUp = false;
int motorStepsPerRev = 800;
float mmPerRev = 95;
byte stepMultiplier = 1;
static float translateX = 0.0;
static float translateY = 0.0;
static float scaleX = 1.0;
static float scaleY = 1.0;
static int rotateTransform = 0;
static int machineWidth = 650;
static int machineHeight = 800;
static int defaultMachineWidth = 650;
static int defaultMachineHeight = 650;
static int defaultMmPerRev = 95;
static int defaultStepsPerRev = 800;
static int defaultStepMultiplier = 1;
float currentMaxSpeed = 800.0;
float currentAcceleration = 400.0;
boolean usingAcceleration = true;
int startLengthMM = 800;
float mmPerStep = mmPerRev / multiplier(motorStepsPerRev);
float stepsPerMM = multiplier(motorStepsPerRev) / mmPerRev;
long pageWidth = machineWidth * stepsPerMM;
long pageHeight = machineHeight * stepsPerMM;
long maxLength = 0;
//static char rowAxis = 'A';
const int INLENGTH = 50;
const char INTERMINATOR = 10;
static float penWidth = 0.8; // line width in mm
boolean reportingPosition = true;
boolean acceleration = true;
extern AccelStepper motorA;
extern AccelStepper motorB;
boolean currentlyRunning = true;
static String inCmd = " ";
static String inParam1 = " ";
static String inParam2 = " ";
static String inParam3 = " ";
static String inParam4 = " ";
byte inNoOfParams;
int rebroadcastReadyInterval = 5000L;
long lastOperationTime = 0L;
long motorIdleTimeBeforePowerDown = 600000L;
boolean automaticPowerDown = false;
long lastInteractionTime = 0L;
#ifdef PIXEL_DRAWING
static boolean lastWaveWasTop = true;
// Drawing direction
const static byte DIR_NE = 1;
const static byte DIR_SE = 2;
const static byte DIR_SW = 3;
const static byte DIR_NW = 4;
const static byte DIR_N = 5;
const static byte DIR_E = 6;
const static byte DIR_S = 7;
const static byte DIR_W = 8;
static int globalDrawDirection = DIR_NW;
const static byte DIR_MODE_AUTO = 1;
const static byte DIR_MODE_PRESET = 2;
const static byte DIR_MODE_RANDOM = 3;
static byte globalDrawDirectionMode = DIR_MODE_AUTO;
#endif
//static int currentRow = 0;
const String READY = "READY";
const String RESEND = "RESEND";
const String DRAWING = "DRAWING";
const String OUT_CMD_CARTESIAN = "CARTESIAN,";
const String OUT_CMD_SYNC = "SYNC,";
static String readyString = READY;
String lastCommand = "";
boolean commandConfirmed = false;
const static String COMMA = ",";
const static String CMD_END = ",END";
const static String CMD_CHANGELENGTH = "C01";
const static String CMD_CHANGEPENWIDTH = "C02";
const static String CMD_CHANGEMOTORSPEED = "C03";
const static String CMD_CHANGEMOTORACCEL = "C04";
#ifdef PIXEL_DRAWING
const static String CMD_DRAWPIXEL = "C05";
const static String CMD_DRAWSCRIBBLEPIXEL = "C06";
//const static String CMD_DRAWRECT = "C07";
const static String CMD_CHANGEDRAWINGDIRECTION = "C08";
const static String CMD_TESTPATTERN = "C10";
const static String CMD_TESTPENWIDTHSQUARE = "C11";
#endif
const static String CMD_SETPOSITION = "C09";
#ifdef PENLIFT
const static String CMD_PENDOWN = "C13";
const static String CMD_PENUP = "C14";
const static String CMD_SETPENLIFTRANGE = "C45";
#endif
#ifdef VECTOR_LINES
const static String CMD_CHANGELENGTHDIRECT = "C17";
#endif
const static String CMD_SETMACHINESIZE = "C24";
const static String CMD_SETMACHINENAME = "C25";
const static String CMD_GETMACHINEDETAILS = "C26";
const static String CMD_RESETEEPROM = "C27";
const static String CMD_SETMACHINEMMPERREV = "C29";
const static String CMD_SETMACHINESTEPSPERREV = "C30";
const static String CMD_SETMOTORSPEED = "C31";
const static String CMD_SETMOTORACCEL = "C32";
const static String CMD_SETMACHINESTEPMULTIPLIER = "C37";
void setup()
{
Serial.begin(57600); // set up Serial library at 57600 bps
Serial.print(F("POLARGRAPH ON!"));
Serial.println();
configuration_motorSetup();
eeprom_loadMachineSpecFromEeprom();
configuration_setup();
motorA.setMaxSpeed(currentMaxSpeed);
motorA.setAcceleration(currentAcceleration);
motorB.setMaxSpeed(currentMaxSpeed);
motorB.setAcceleration(currentAcceleration);
float startLength = ((float) startLengthMM / (float) mmPerRev) * (float) motorStepsPerRev;
motorA.setCurrentPosition(startLength);
motorB.setCurrentPosition(startLength);
readyString = READY;
comms_establishContact();
#ifdef PENLIFT
penlift_penUp();
#endif
delay(500);
}
void loop()
{
lastCommand = comms_waitForNextCommand();
comms_parseAndExecuteCommand(lastCommand);
}
Here is the Configuration tab (with micro-stepping)
/**
* Polargraph Server. - CORE
* Written by Sandy Noble
* Released under GNU License version 3.
* http://www.polargraph.co.uk
* http://code.google.com/p/polargraph/
Configuration.
This is one of the core files for the polargraph server program.
It sets up the motor objects (AccelSteppers), and has default
values for the motor, sprocket and microstepping combinations used
by polargraphs so far.
Comment out the blocks of code you don't need.
*/
// motor configurations for the various electrical schemes
// =================================================================
// 1. Adafruit motorshield
// Using Adafruit Motorshield V2? Comment out this one line underneath.
//#include <AFMotor.h>
// Using Adafruit Motorshield V1? Comment out the three INCLUDE lines below.
#include <Wire.h>
#include <Adafruit_MotorShield.h>
#include "utility/Adafruit_PWMServoDriver.h"
#ifdef ADAFRUIT_MOTORSHIELD_V1
const int stepType = INTERLEAVE;
AF_Stepper afMotorA(motorStepsPerRev, 1);
AF_Stepper afMotorB(motorStepsPerRev, 2);
void forwarda() { afMotorA.onestep(FORWARD, stepType); }
void backwarda() { afMotorA.onestep(BACKWARD, stepType); }
void forwardb() { afMotorB.onestep(FORWARD, stepType); }
void backwardb() { afMotorB.onestep(BACKWARD, stepType); }
#endif
#ifdef ADAFRUIT_MOTORSHIELD_V2
const int stepType = MICROSTEP;
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
Adafruit_StepperMotor *afMotorA = AFMS.getStepper(motorStepsPerRev, 1);
Adafruit_StepperMotor *afMotorB = AFMS.getStepper(motorStepsPerRev, 2);
void forwarda() { afMotorA->onestep(FORWARD, stepType); }
void backwarda() { afMotorA->onestep(BACKWARD, stepType); }
void forwardb() { afMotorB->onestep(FORWARD, stepType); }
void backwardb() { afMotorB->onestep(BACKWARD, stepType); }
#endif
AccelStepper motorA(forwarda, backwarda);
AccelStepper motorB(forwardb, backwardb);
void configuration_motorSetup()
{
// no initial setup for these kinds of motor drivers
}
void configuration_setup()
{
defaultMachineWidth = 650;
defaultMachineHeight = 650;
defaultMmPerRev = 95;
defaultStepsPerRev = 200;
defaultStepMultiplier = 16;
#ifdef ADAFRUIT_MOTORSHIELD_V2
AFMS.begin(); // create with the default frequency 1.6KHz
#endif
delay(500);
}
// end of Adafruit motorshield definition
// =================================================================
|

 Author
Author Towards running a Polargraph with an Adafruit Motorshield V2
Towards running a Polargraph with an Adafruit Motorshield V2
