Hi. I have an issue with ULN2003 and will appreciate help troubleshooting it.
I've built polargraph from acrylic parts, mechanically it works nicely. Here is the photo of my setup:
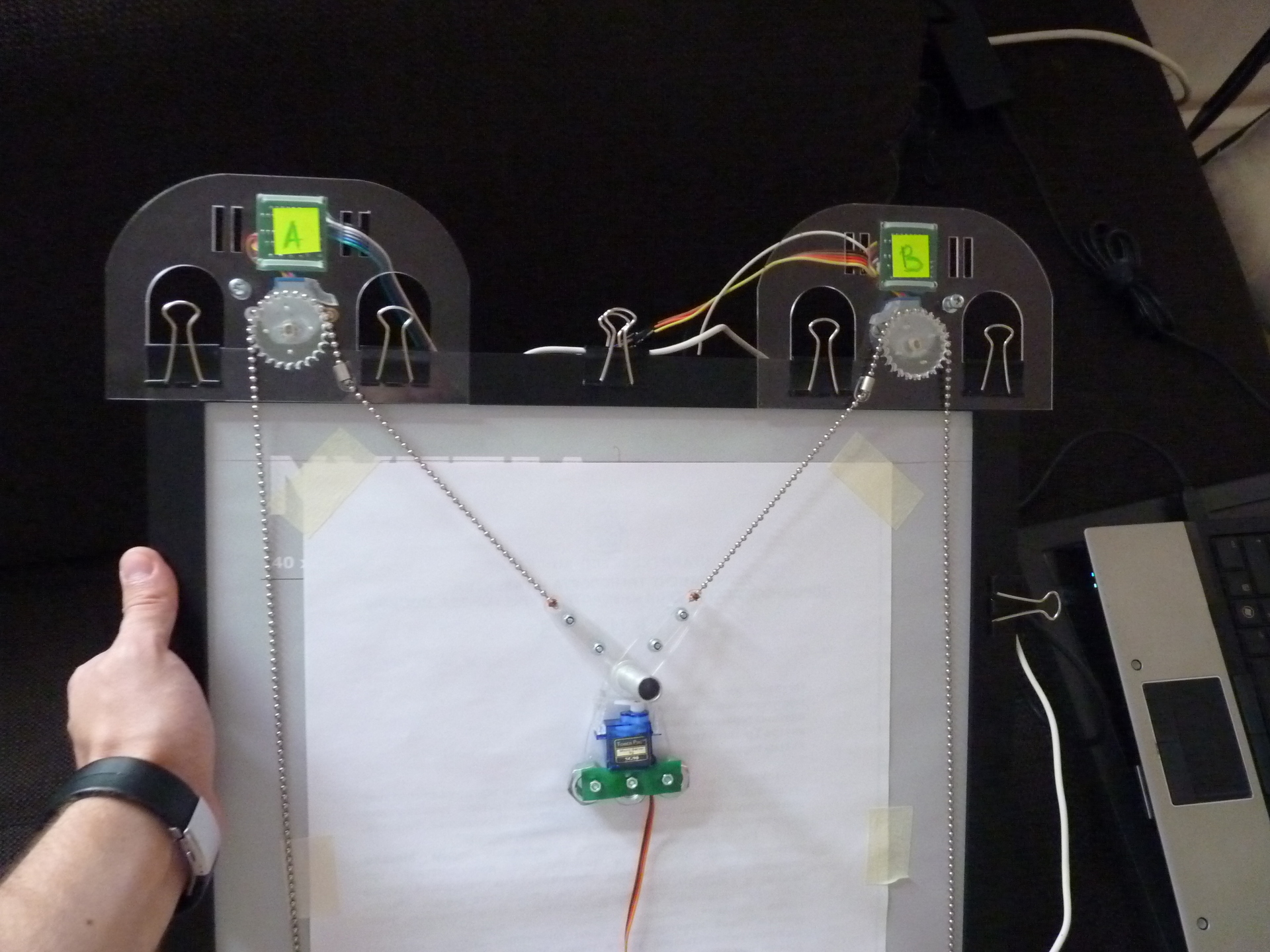
Arduino UNO has separate 9V 1A power supply.
The code looks like this:
in polargraph_server_a1:
#define UNL2003_DRIVER
const int DEFAULT_MM_PER_REV = 108; // Measured myself
const int DEFAULT_STEPS_PER_REV = 4075.7728; // For 8-step control signal sequence
const int DEFAULT_STEP_MULTIPLIER = 1;
static float currentMaxSpeed = 1000.0;
in configuration.ino:
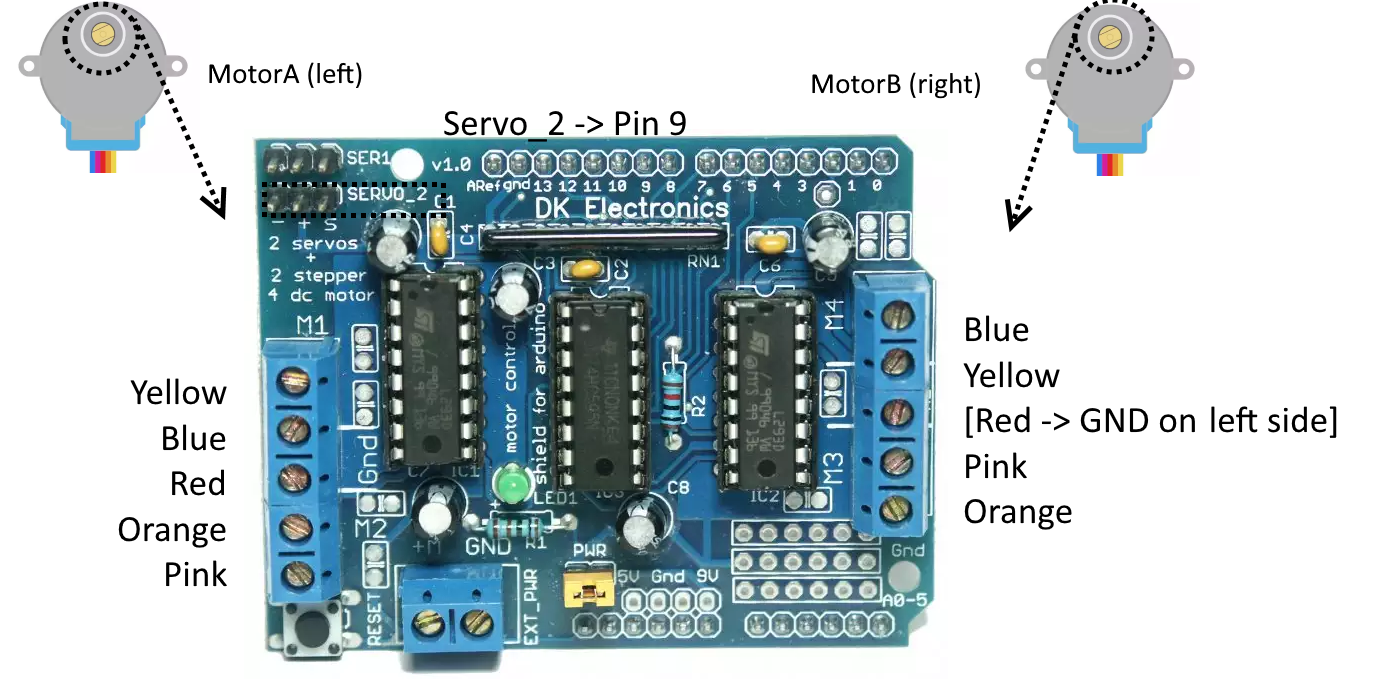
AccelStepper motorA(8, 2, 4, 3, 5); // Left stepper. 8-step
AccelStepper motorB(8, 6, 8, 7, 9); //Right stepper.
motorA.setPinsInverted(false, false, true);
motorB.setPinsInverted(true, false, true); // This is from original package
// motorB.setPinsInverted(false, false, true); // Changing first argument to False didn't help
Any ideas? Thanks in advance.
|
 Author
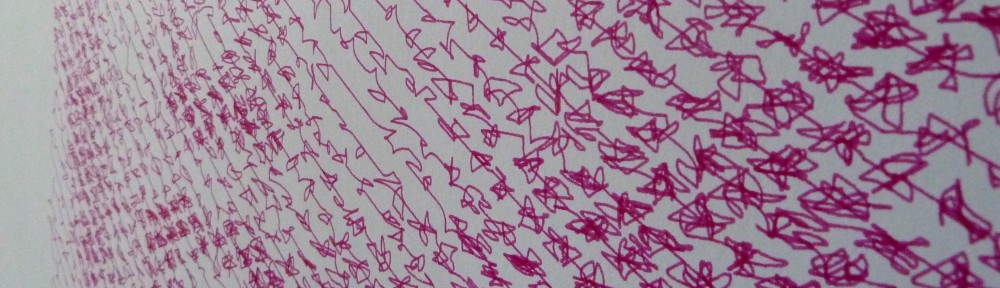
Author ULN2003 & 28YBJ-48: MotorB rotates in wrong direction
ULN2003 & 28YBJ-48: MotorB rotates in wrong direction