검색결과 리스트
글
RHex라는 로봇이 있습니다. 이 로봇 형태가 처음 제안되고 개발되기 시작한 것은 1998년입니다. 물론 이 연도는 그 이전에 순수하게 개발하던 분들을 포함하는 것이 아니라, 미국의 DARPA(Defence Advanced Research Projects Agency)라는 일종의 미국 국방쪽 개발 자금을 관리하는 기관에서 지원하기 시작한 연도입니다. 초기에는 5년간 5백만달러라는 거금이 투자된 로봇입니다.
우리돈으로는 대략 지금 환율로는 56억원정도인데요. 문제는 연도죠^^. 98년에 5백만달러라니... 1987년에 600백만 달러의 사나이라는 미국 드라마가 있었습니다. 어마어마한 과학의 힘으로 다 죽어가던 주인공을 몹시 빠르게 (차보다 빨리) 달리고, 몹시 높게 점프하고 (빌딩옥상정도는 가뿐이), 몹시 큰 힘으로 아름드리 나무정도는 그냥 넘어뜨리고, 몹시 멀리보는 눈을 가진 뭐 그런 사람인데요. 드라마 설정에서 그 정도 만드는데, 당시 600백만달러가 든다고 생각했던 겁니다. 단순히 지금 환율로 56억원?? 이라고 계산하면 안되는 거죠.
하여간 그렇게 큰 돈을 들여 만든게 RHex라는 로봇으로 초기에 참여한 대학만, 미시간대학, 맥길대학, 카네기멜론대학, 캘리포니아 대학, 프린스턴 대학, 코넬 대학입니다. 이 정도 어마어마한 대학들이 참여했죠. 정부돈 500백만 달러를 받으면서 말이죠.^^.
일단, RHex하면 좀 유명한 곳이 요즘엔 Boston Dynamics사입니다. 이 곳은 Big Dog으로 더 유명한데요. 이 회사가 또 RHex도 만들었죠. 제가 한 번 예전에 제 블로그에서 소개한적이 있습니다. [관련글]

위의 놈이 바로 Boston Dynamics사의 RHex입니다.
그리고, 저희도 RHex를 만들었습니다. 일단, 바디만(^^).... 그게 5월이었는데요.[관련글] 누구는 정부돈 60억원 가까이 받으면서 만드는데... 저희는 그냥 만들었습니다.ㅠㅠ. 도대체 왜 그러냐고 묻진 말아주세요.^^

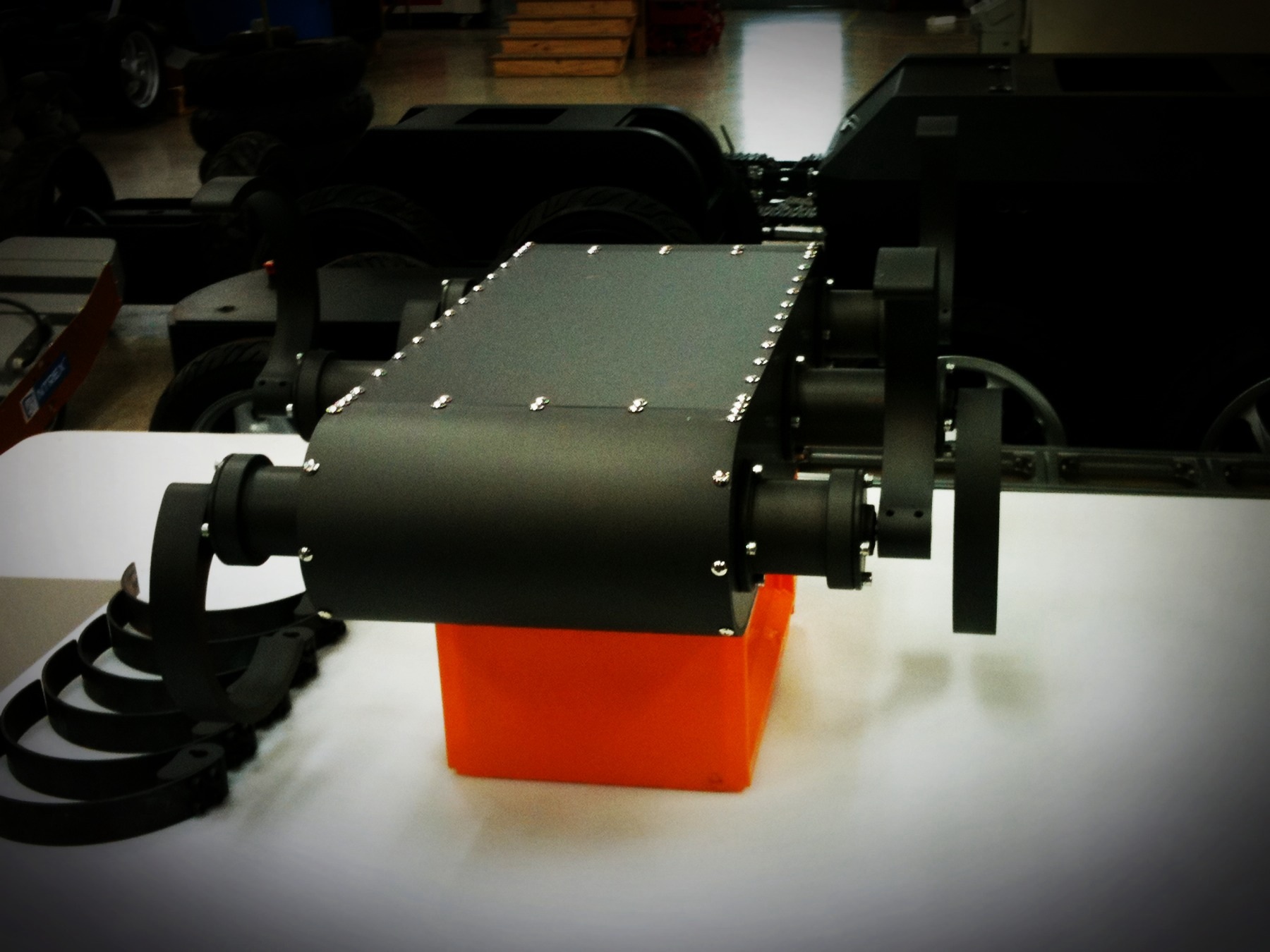
아무튼 위 그림의 RHex가 올해(2011) 5월경 만든 RHex의 외형입니다. 그런데 도대체 왜 12월인 지금.. 완성품도 아니고 테스트버젼을 간신히 내놓느냐구요?^^
일단, 시작하고서 8월말부터 9월말까지 무려 한달이나, 본사 및 연구소의 이전으로 정신이 없었습니다.[관련글1, 관련글2] 그 때문에, 밀린 주문에 업무정상화에 꽤 많은 시간이 들었구요. 또 연이어 10월 말경... 2011로보월드에 참가했습니다.[관련글] 이 전시회라는게 정말 준비하고 해야할 일이 많거든요. 그리고는 다시 11월 말경의 회사 이전식[관련글]에 맞춰 연구소도 전시회 수준으로 다시 준비했습니다. 이런 내외적인 행사와 사정으로 많이 늦어진거죠.. (응??? 여기다 대고 왜 변명을....ㅠㅠ)
음.. 이런 외적인 요인도 있었지만, 기술적인 문제도 좀 있었습니다. 먼저, 저희 모델이 좀 무겁게 만들어지는 바람에 모터 선정에 애를 좀 먹었습니다. 작으면서, 힘 좋은 놈으로 말이죠.. 결국 맥슨모터를 6개 장착할 수 밖에 없었어요. 개 당 90만원짜리를...ㅠㅠ. 제길... 누구는 60억 받고 만드는데....ㅠㅠ 아무도 알아주지 않지만, 우리의 개발은 계속되야죠^^... 그런데 문제는 여기서 발생합니다. 이 맥슨 모터가 도착하는데 무려 6주....ㅠㅠ
그 후 다시 저희는 문제에 봉착합니다. 바로, 모터의 서보제어기능입니다. 그래서 RHex에 쓸려고 DC 모터의 서보제어를 또 학습해서 구현하게 됩니다.[관련글] 그게 7월경이에요^^. 그러니, 사실 저희가 5월에 만들어서, 탱자탱자 논건 아니죠^^
그러나, 아직도 걸음마 단계입니다. 정말 동영상 보시면 아시겠지만, 정말 그냥 걸음마입니다.^^. 그러나, 최초로 달에 가셨다는 그분....

닐 암스트롱(Neil Alden Armstrong)이라는 분이 이런 말씀을 하셨다죠...
넵.. 저희도 그런 작은 한 걸음을 물론 발이 6개니까 좀 이상하지만, 하여간 한 걸음을 걸었습니다.^^
일단, 이전에 소개했지만, Boston Dynamics의 멋진 RHex를 보시죠.
그리고, 아직 저희의 걸음마 RHex를 보시죠^^. 그전에 하나더 고백하면, 엔코더를 앱솔루트형태가 아닌 인크리멘탈형을 역~시 실수로 채택하는 바람에 초기에 정렬하는 과정이 나타납니다.ㅠㅠ. 아 그리고, 아주 천천히 움직입니다. 일단은 테스트버젼이니까요^^.
아무튼.. 시작이니까요^^.
이제.. 영하로 확 떨어져버렸습니다. 몹시 옆구리가 시려운 계절인데요. 뭐 전 여친이 없어도 괜찮습니다. 저에게는 따뜻한 보온용 뱃살이..... 켁.....ㅠㅠ. 절대.. 절대... 회사 냉장고에 있던 막걸리 반병 몰래 훔쳐마시고는 횡설수설하는거 아닙니다.ㅠㅠ.
그리고, 이 글은 제가 몸담고 있는 저희 연구소 블로그에도 동시에 포스팅되었습니다만, 거기는 역시 약간 공적인 장소라 이런 주저리주저리가 들어가 있지는 않습니다.^^. 회사 블로그는 초간단으로 올리고, 여기다가는 이렇게 자세히 올린다고, 누가 뭐라 하면 어쩌죠???^^
아.. 그리고 RHex라는 로봇의 장점이 뭐냐구요??? 그건 첫 번째 동영상인 잘 굴러가는 Boston Dynamics사의 RHex를 보시면, 일반 바퀴가 가지 못하는 곳을 갈 수 있으면서, 정말 관절형 다리가 달린 애들보다는 간단하다는 장점이 있다는 것을 아실 수 있습니다.^^.
우리돈으로는 대략 지금 환율로는 56억원정도인데요. 문제는 연도죠^^. 98년에 5백만달러라니... 1987년에 600백만 달러의 사나이라는 미국 드라마가 있었습니다. 어마어마한 과학의 힘으로 다 죽어가던 주인공을 몹시 빠르게 (차보다 빨리) 달리고, 몹시 높게 점프하고 (빌딩옥상정도는 가뿐이), 몹시 큰 힘으로 아름드리 나무정도는 그냥 넘어뜨리고, 몹시 멀리보는 눈을 가진 뭐 그런 사람인데요. 드라마 설정에서 그 정도 만드는데, 당시 600백만달러가 든다고 생각했던 겁니다. 단순히 지금 환율로 56억원?? 이라고 계산하면 안되는 거죠.
하여간 그렇게 큰 돈을 들여 만든게 RHex라는 로봇으로 초기에 참여한 대학만, 미시간대학, 맥길대학, 카네기멜론대학, 캘리포니아 대학, 프린스턴 대학, 코넬 대학입니다. 이 정도 어마어마한 대학들이 참여했죠. 정부돈 500백만 달러를 받으면서 말이죠.^^.
일단, RHex하면 좀 유명한 곳이 요즘엔 Boston Dynamics사입니다. 이 곳은 Big Dog으로 더 유명한데요. 이 회사가 또 RHex도 만들었죠. 제가 한 번 예전에 제 블로그에서 소개한적이 있습니다. [관련글]
위의 놈이 바로 Boston Dynamics사의 RHex입니다.
그리고, 저희도 RHex를 만들었습니다. 일단, 바디만(^^).... 그게 5월이었는데요.[관련글] 누구는 정부돈 60억원 가까이 받으면서 만드는데... 저희는 그냥 만들었습니다.ㅠㅠ. 도대체 왜 그러냐고 묻진 말아주세요.^^
아무튼 위 그림의 RHex가 올해(2011) 5월경 만든 RHex의 외형입니다. 그런데 도대체 왜 12월인 지금.. 완성품도 아니고 테스트버젼을 간신히 내놓느냐구요?^^
일단, 시작하고서 8월말부터 9월말까지 무려 한달이나, 본사 및 연구소의 이전으로 정신이 없었습니다.[관련글1, 관련글2] 그 때문에, 밀린 주문에 업무정상화에 꽤 많은 시간이 들었구요. 또 연이어 10월 말경... 2011로보월드에 참가했습니다.[관련글] 이 전시회라는게 정말 준비하고 해야할 일이 많거든요. 그리고는 다시 11월 말경의 회사 이전식[관련글]에 맞춰 연구소도 전시회 수준으로 다시 준비했습니다. 이런 내외적인 행사와 사정으로 많이 늦어진거죠.. (응??? 여기다 대고 왜 변명을....ㅠㅠ)
음.. 이런 외적인 요인도 있었지만, 기술적인 문제도 좀 있었습니다. 먼저, 저희 모델이 좀 무겁게 만들어지는 바람에 모터 선정에 애를 좀 먹었습니다. 작으면서, 힘 좋은 놈으로 말이죠.. 결국 맥슨모터를 6개 장착할 수 밖에 없었어요. 개 당 90만원짜리를...ㅠㅠ. 제길... 누구는 60억 받고 만드는데....ㅠㅠ 아무도 알아주지 않지만, 우리의 개발은 계속되야죠^^... 그런데 문제는 여기서 발생합니다. 이 맥슨 모터가 도착하는데 무려 6주....ㅠㅠ
그 후 다시 저희는 문제에 봉착합니다. 바로, 모터의 서보제어기능입니다. 그래서 RHex에 쓸려고 DC 모터의 서보제어를 또 학습해서 구현하게 됩니다.[관련글] 그게 7월경이에요^^. 그러니, 사실 저희가 5월에 만들어서, 탱자탱자 논건 아니죠^^
그러나, 아직도 걸음마 단계입니다. 정말 동영상 보시면 아시겠지만, 정말 그냥 걸음마입니다.^^. 그러나, 최초로 달에 가셨다는 그분....
닐 암스트롱(Neil Alden Armstrong)이라는 분이 이런 말씀을 하셨다죠...
이것은 한 인간에 있어서는 작은 한 걸음이지만, 인류 전체에 있어서는 위대한 약진이다.
That's one small step for a man, one giant leap for mankind
- 닐 암스트롱 -
That's one small step for a man, one giant leap for mankind
- 닐 암스트롱 -
일단, 이전에 소개했지만, Boston Dynamics의 멋진 RHex를 보시죠.
그리고, 아직 저희의 걸음마 RHex를 보시죠^^. 그전에 하나더 고백하면, 엔코더를 앱솔루트형태가 아닌 인크리멘탈형을 역~시 실수로 채택하는 바람에 초기에 정렬하는 과정이 나타납니다.ㅠㅠ. 아 그리고, 아주 천천히 움직입니다. 일단은 테스트버젼이니까요^^.
아무튼.. 시작이니까요^^.
이제.. 영하로 확 떨어져버렸습니다. 몹시 옆구리가 시려운 계절인데요. 뭐 전 여친이 없어도 괜찮습니다. 저에게는 따뜻한 보온용 뱃살이..... 켁.....ㅠㅠ. 절대.. 절대... 회사 냉장고에 있던 막걸리 반병 몰래 훔쳐마시고는 횡설수설하는거 아닙니다.ㅠㅠ.
그리고, 이 글은 제가 몸담고 있는 저희 연구소 블로그에도 동시에 포스팅되었습니다만, 거기는 역시 약간 공적인 장소라 이런 주저리주저리가 들어가 있지는 않습니다.^^. 회사 블로그는 초간단으로 올리고, 여기다가는 이렇게 자세히 올린다고, 누가 뭐라 하면 어쩌죠???^^
아.. 그리고 RHex라는 로봇의 장점이 뭐냐구요??? 그건 첫 번째 동영상인 잘 굴러가는 Boston Dynamics사의 RHex를 보시면, 일반 바퀴가 가지 못하는 곳을 갈 수 있으면서, 정말 관절형 다리가 달린 애들보다는 간단하다는 장점이 있다는 것을 아실 수 있습니다.^^.
'The Robot > Robot by PinkWink' 카테고리의 다른 글
| 실외 탑승형 로봇. 무인 자율 주행 전기차를 테스트 중이에요^^ (20) | 2012/02/29 |
|---|---|
| RHex 로봇 테스트 버젼 - 기능 업그레이드 (20) | 2012/01/14 |
| 스케이트 보드 로봇이 제품으로 출시 되었습니다. (16) | 2012/01/06 |
| RHex 로봇... 테스트 버젼 (12) | 2011/12/08 |
| 좀 큰 밸런싱 로봇 두번째 - 손따라 다니기 - (22) | 2011/10/24 |
| 메카넘휠을 이용한 AGV - 라인트레이서 (12) | 2011/10/07 |
| [스케이트보드로봇] 구현하기... (14) | 2011/08/07 |
| 좀 큰 밸런싱 로봇 ^^ (16) | 2011/07/15 |
설정
트랙백
http://pinkwink.kr/trackback/489


재초작업에도 응용하면 대박이겠어요...ㅋㅋ
ㅋㅋㅋ 대신 땅을 좀 헤집을 거에요.. ㅎㅎ^^
상당히 빠른 걸요.
요기서 좀 더 발전하면 일어설 것 같습니다. ^^
통통 튀어야죠^^
전진하는 모습이 참 특이하네요^^ 마치 군인 같아요ㅎㅎ
아스팔트같은곳에선 좀 투박하죠. 애초 개념자체가 화면에 보이는 그런 곳을 움직이도록 되어있으니 말이죠^^
로봇보다 낭만적으로 사시는 핑크윙크님의 이야기가 더 와닿습니다.^^
감기조심하세요.
넵.. 감사합니다.. 낭만도 분위기도 좋은데 무쟈게 요즘은 추워서 집밖으로 나오기가 싫더라구요^^
시간이 지나면 정말로 사람과 비슷한 로봇이 나올지도 모를거같네염..
요즘은 사람의 표정까지도 흉내내는 그런 로봇들이 나오기 시작하더군요. 또 그런 로봇을 이용해서 뮤지컬이나 밴드공연도 하구요^^
엔지니어에게 왜 이런걸 하냐고 물어보면
하고 싶으니까 하지요~ 라고 대답하면 되지요~ ㅋㅋㅋ
ㅎㅎ 왜하냐건... 웃지용^^