💾Software - Rotrics Studio
📅Update: 2020/08/14
🧙♂ Tips: You can click the TOP RIGHT table of contents to read the corresponding section 👉
Rotrics Studio is a multi-platform control program designed for Rotrics Robot Arm. It contains a rich set of case libraries and equipped with multiple functions such as writing/drawing, laser engraving, pneumatic moving, and Scratch visual programming.
It integrates robot arm operation steps from importing images, generating G-code files to sending commands to the robot arm. It supports multi-platform use such as Windows, Mac OS, Linux.
This section describes the Rotrics Studio operation under Windows.
Click to download Rotrics Studio software - www.rotrics.com/download
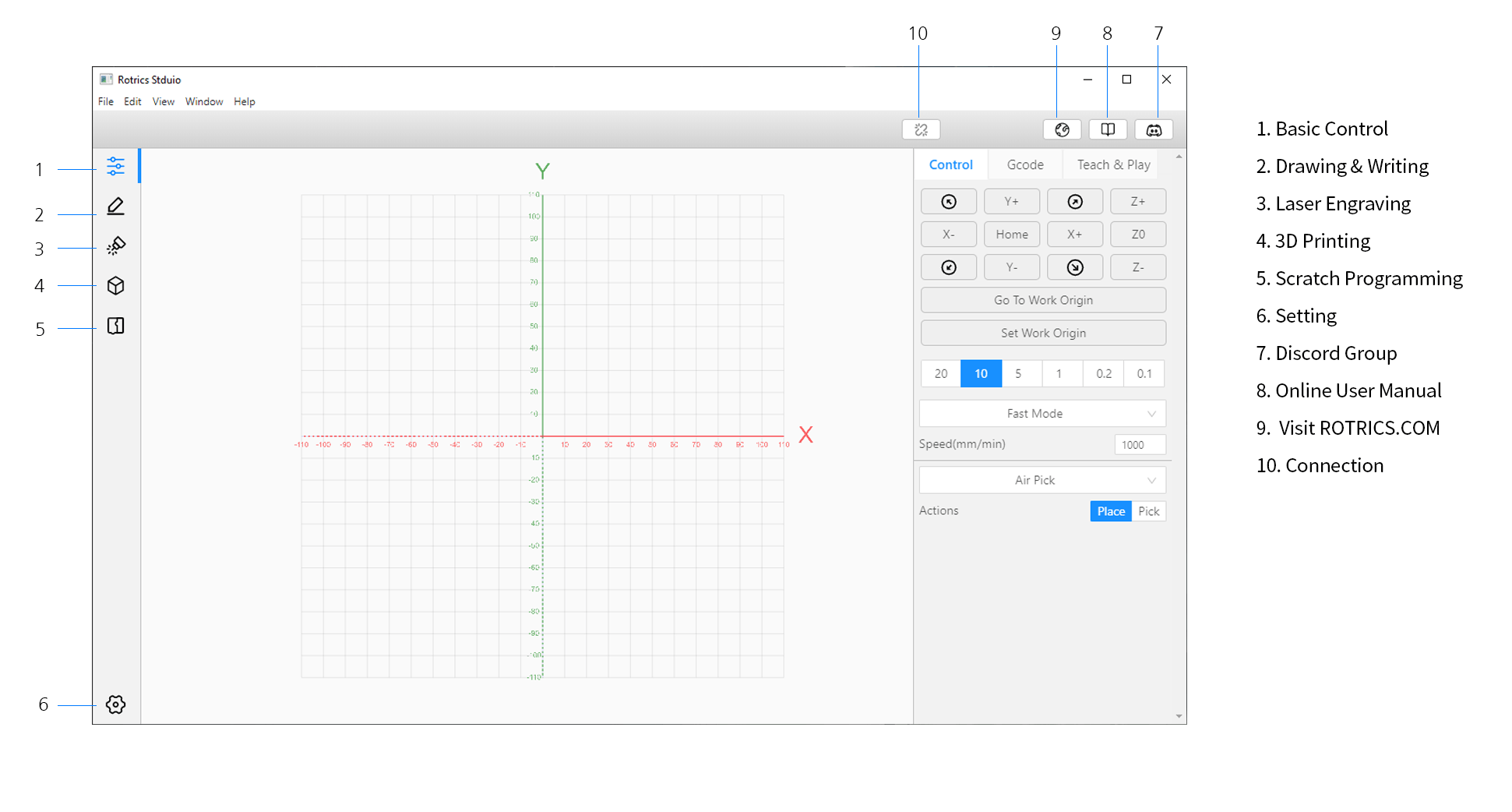
Basic Control
This panel can control robot arm basic movement via parameter adjustment, test modular functions and import G-Code file and etc.
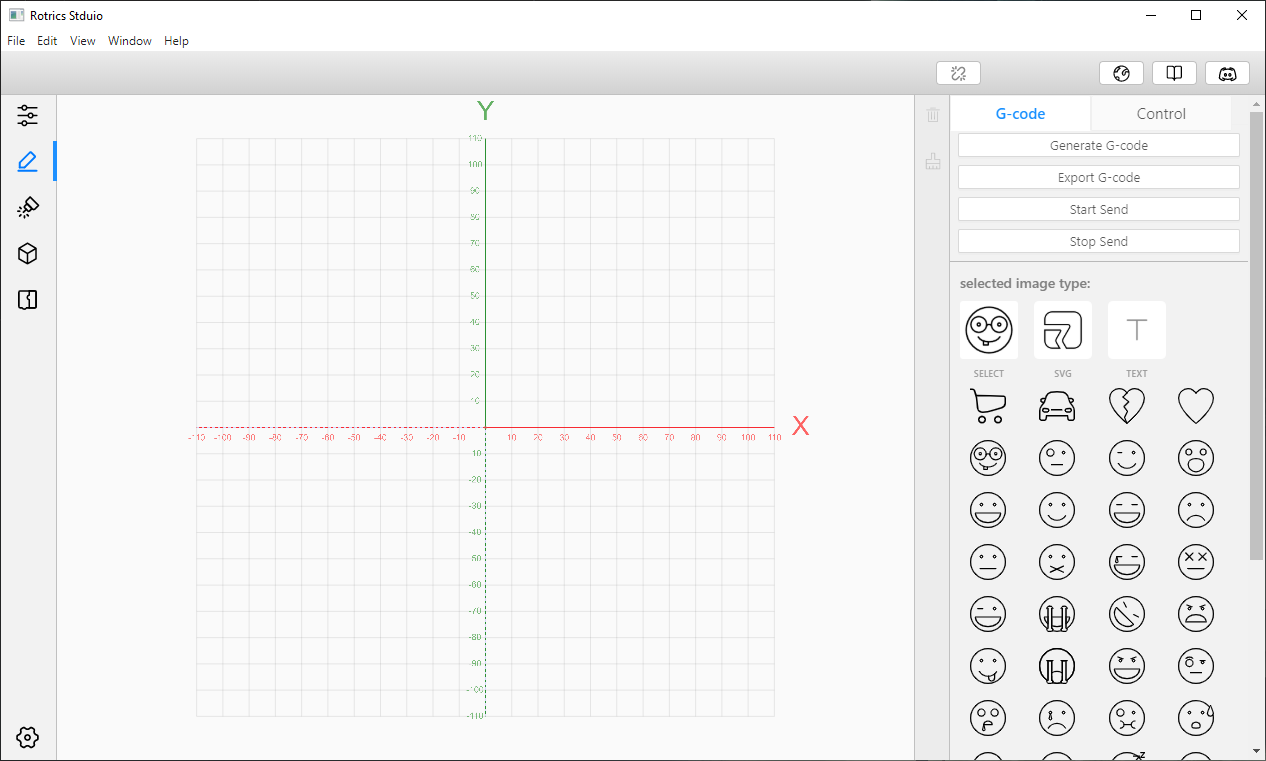
Writing & Drawing
Import images/texts, adjust pen height, generate G-code file, send commands to control writing and drawing.
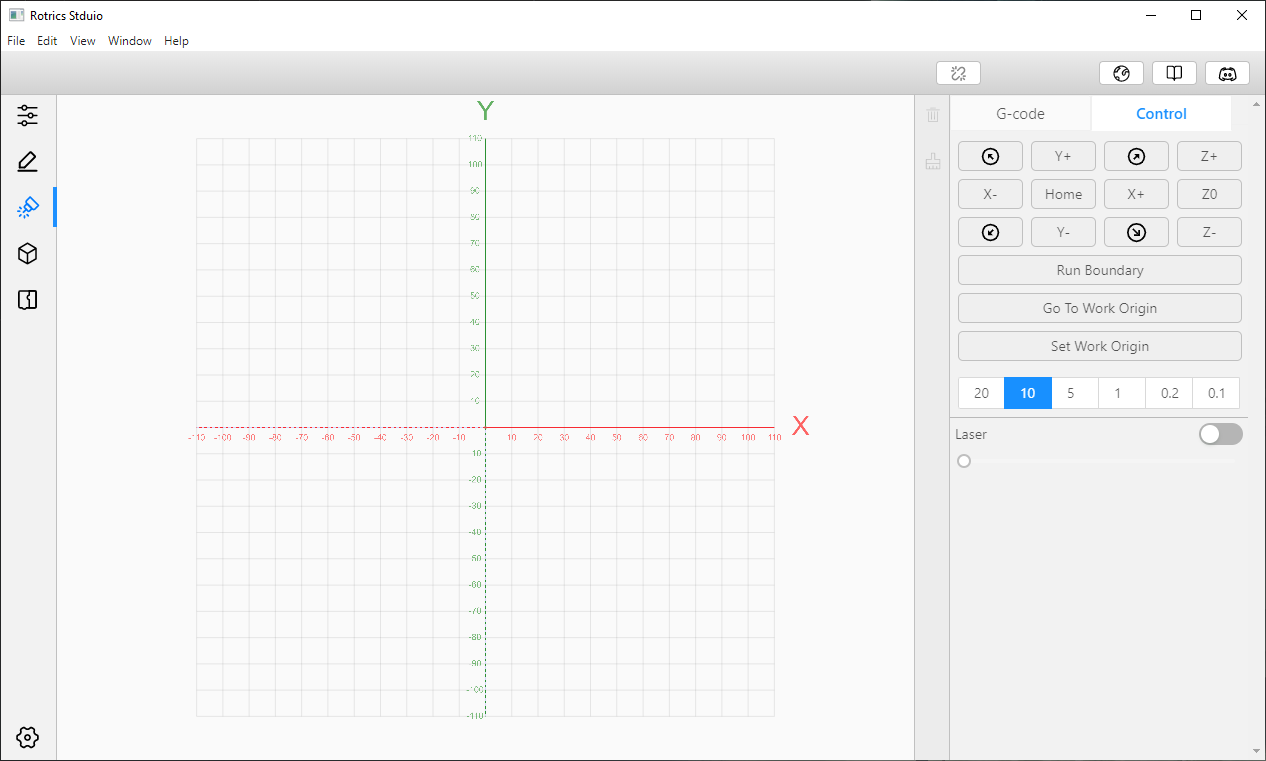
Laser Engraving
Import images/texts, adjust engraving parameters, adjust laser power, generate G-code file, send commands to control laser engraving.
3D Printing
Import STL/OBJ files for slicing and generate 3D printing G-codes and start 3D printing.
Scratch Programming
Program to control your DexArm with Scratch visual programming. Easy to start coding even without any programming experience.
Setting
Check your device information and software version, upgrade firmware, set software languages and other configurations.
Discord Group
Visit to get technical support or submit feedback or suggestions.
Online Tutorials
Learn everything you need to know about using Rotrics DexArm.
Visit ROTROCS.COM
Visit Rotrics official website or purchase accessories.
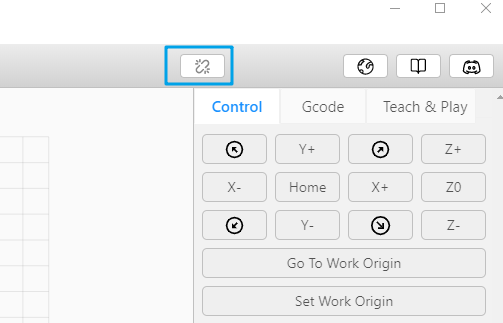
Connection
To connect/disconnect with the Arm.
Control
Shows the robot arm movement position, click the button to control robot arm movement in X, Y, Z axis, set up working original position, adjust motion speed, and change between the following two motion modes:
Straight Line: A pattern in which robot arm moves between two points along a straight line. Assume that there are two points: A and B. Under the straight-line mode, the robot arm will move from A to B along a straight-line trajectory. This is suitable for motion with a given trajectory, such as writing, drawing, laser engraving and 3D printing. If the given trajectory is an arc, the arc will be decomposed into subdivided straight lines by interpolation algorithm to simulate the arc trajectory. Please refer to Wiki for a specific interpolation explanation.
Fast Mode: A pattern in which robot arm moves between two points along an uncertain trajectory. Assume that there are two points: A and B. Under fast mode, the mainboard will send commands to multiple motors, the movement trajectory of the robot arm between two points is uncertain. The process is out of control in fast mode, and the computer doesn't run the interpolation algorithm. This is suitable for tasks that don't require movement trajectories, such as picking/placing or playing the piano. The fast mode moves 4-5 times faster than the straight-line mode, and the motor moves more smoothly.
G-code
Click to load G-code file generated by third-party software(such as Cura and Inkscape), execute G-code file and check the current status.
Teach & Play
Drag and record your DexArm's movements and replay for picking and placing.
Working Area
Check the current working task, click the image/texts to adjust the size, click the button on the right to start, stop, end current work.
G-code
Click to upload preset images, texts, or customized images (only SVG images are supported). Generate G-codes and start drawing.
Control
Click to control DexArm''s movement and set work origin.
Working Area
Check the current working task, click the image/texts to adjust size, click the button on the right to start, stop, end current work.
G-code
Click to enter texts or upload images, adjust images parameters. B&W and GREYSCALE modes support PNG and JPG files, VACTOR mode support SVG files. Click to set working speed and laser power, click the button to generate laser engraving G-code file.
Control
Turn on laser for focusing and set work origin.
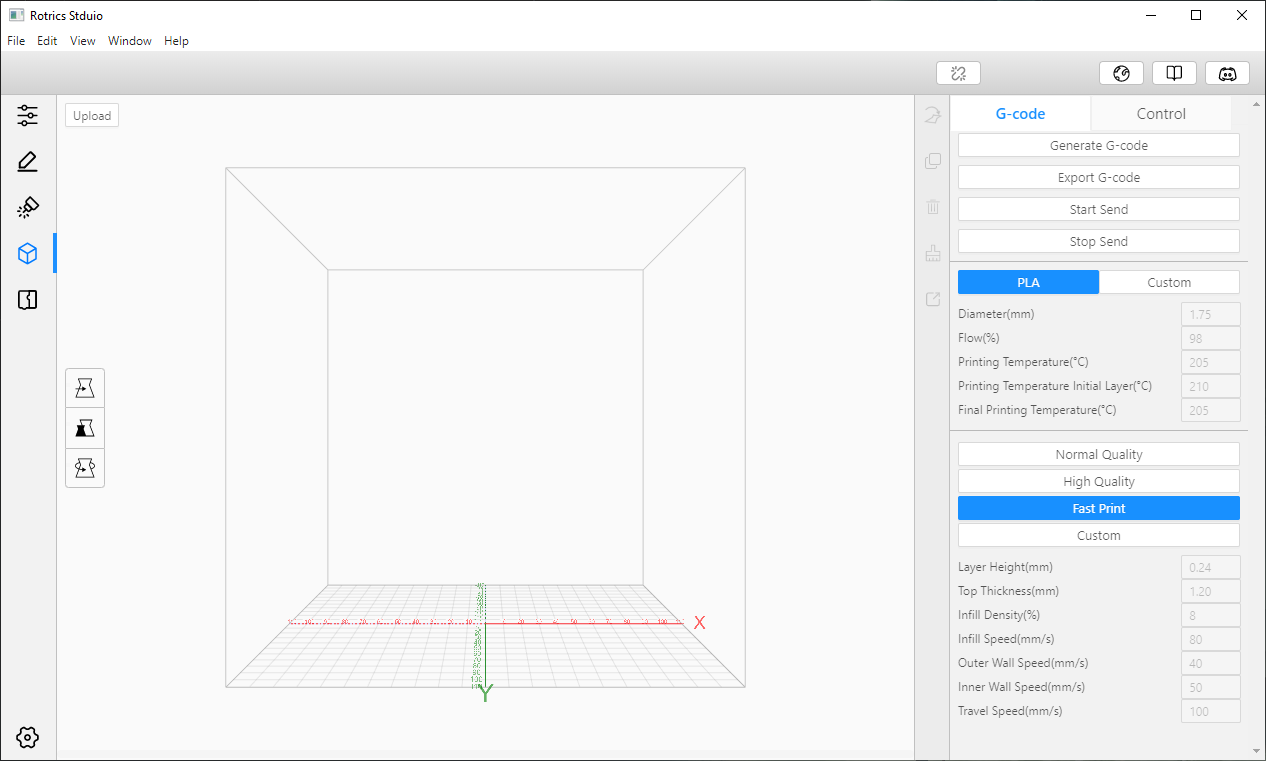
Build Area
Upload STL/OBJ format 3D model for slicing and adjust the model size and orientation and position.
G-code
Adjust 3D printing parameters, generate 3D printing G-code and start printing.
Control
Set 3D printing work origin and level your DexArm for better 3D printing performance.
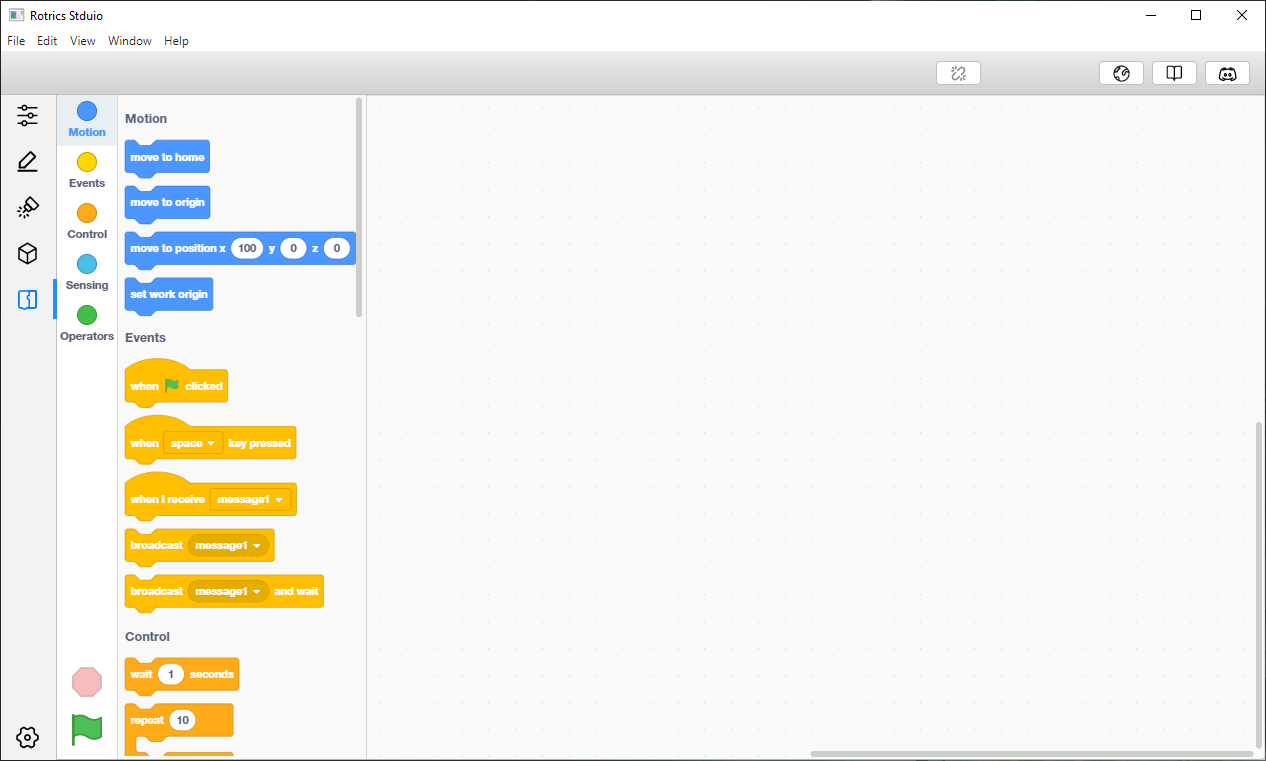
Code Blocks
Click to execute the movements or drag to write a visual program project.
Script
The main program of your project, drag to adjust the blocks' order and control your DexArm to complete a complicated task.
1. Connect Rotrics DexArm and computer with USB-C cable.

2. Open Rotrics Studio software.
3. Click the Connection button on the top, select your robot arm and click Connect.
G-code is the most widely used numerical control programing language. It is used mainly in computer-aided manufacturing.
There are different methods to generate G-code for different functions. Click the following link to jump to relevant G-code generating instructions: