🗺️Product Overview
📅Update: 2020/09/28
🧙♂ Tips: You can also click the TOP RIGHT table of contents to read the corresponding section👉
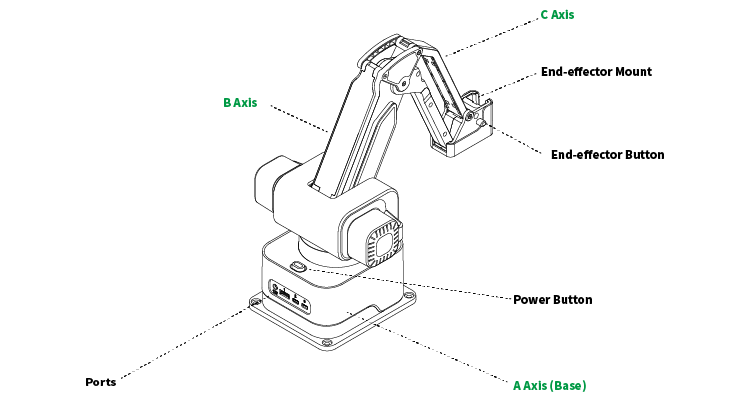
Rotrics DexArm is a versatile high precision desktop robot arm. It is equipped with specially designed modular end-effector, super noiseless motor driver and patented decelerator which allows 0.05mm extremely high repeatability.
Thanks to the modular design, Rotrics Robot Arm can easily switch among different functions, such as writing/drawing, laser engraving, 3D printing and picking/placing. With easy-to-use software, Rotrics give you an intuitive and interactive way to control and bring your ideas in just a few clicks.
Rotrics also provides experienced developers with API in multi-language such as Python and C++. You can easily control the Robot Arm with SDK programming, and integrate it into your existing project.
The default coordinate system is Cartesian coordinate system (also called Rectangular Coordinate system). The origin is located at where the base and Axis-2 meet.
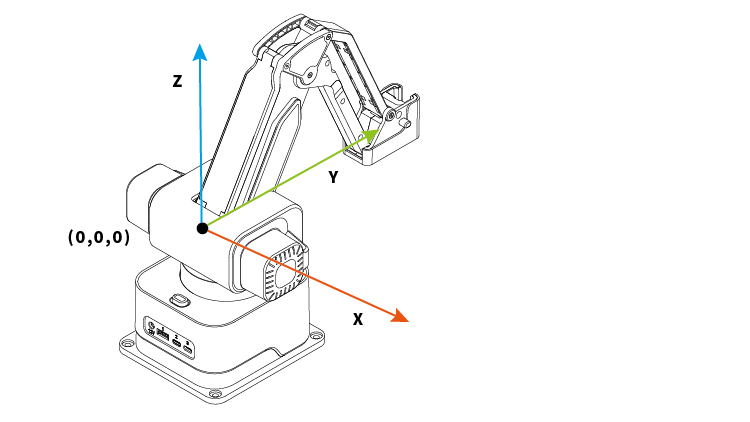
💡Tips: To acquire the maximum working space, it's recommended to start working with position X0,Y300,Z0. In Rotrics Studio software and our touchscreen, we call this position as "HOME" position.
For Rotrics Studio software, it's good to go if your image sizes are under 220x220mm. We will add the real-time valid working area in our next version.
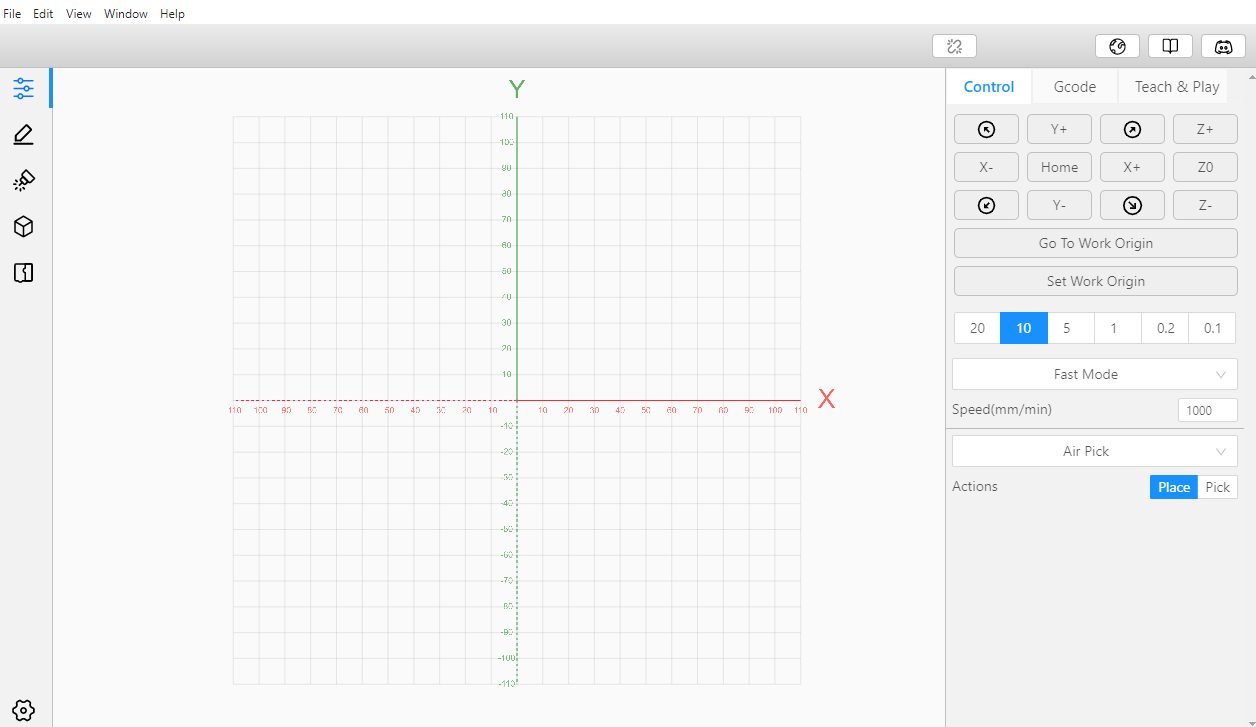
If you want to work with G-code generated by a 3rd-party software, please set an offset value (set the working origin position as X0, Y300), or use command G92 to set working origin position (adjust the Arm to a position and then send command G92 X0 Y0 Z0 ).
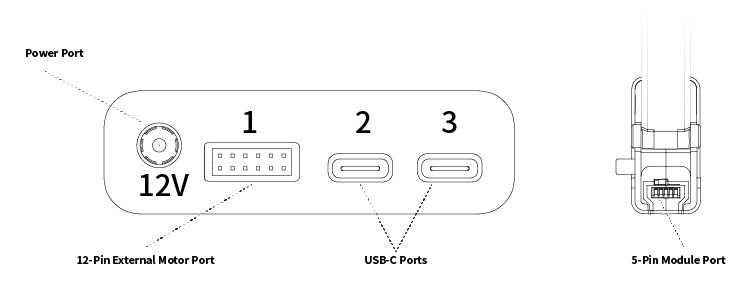
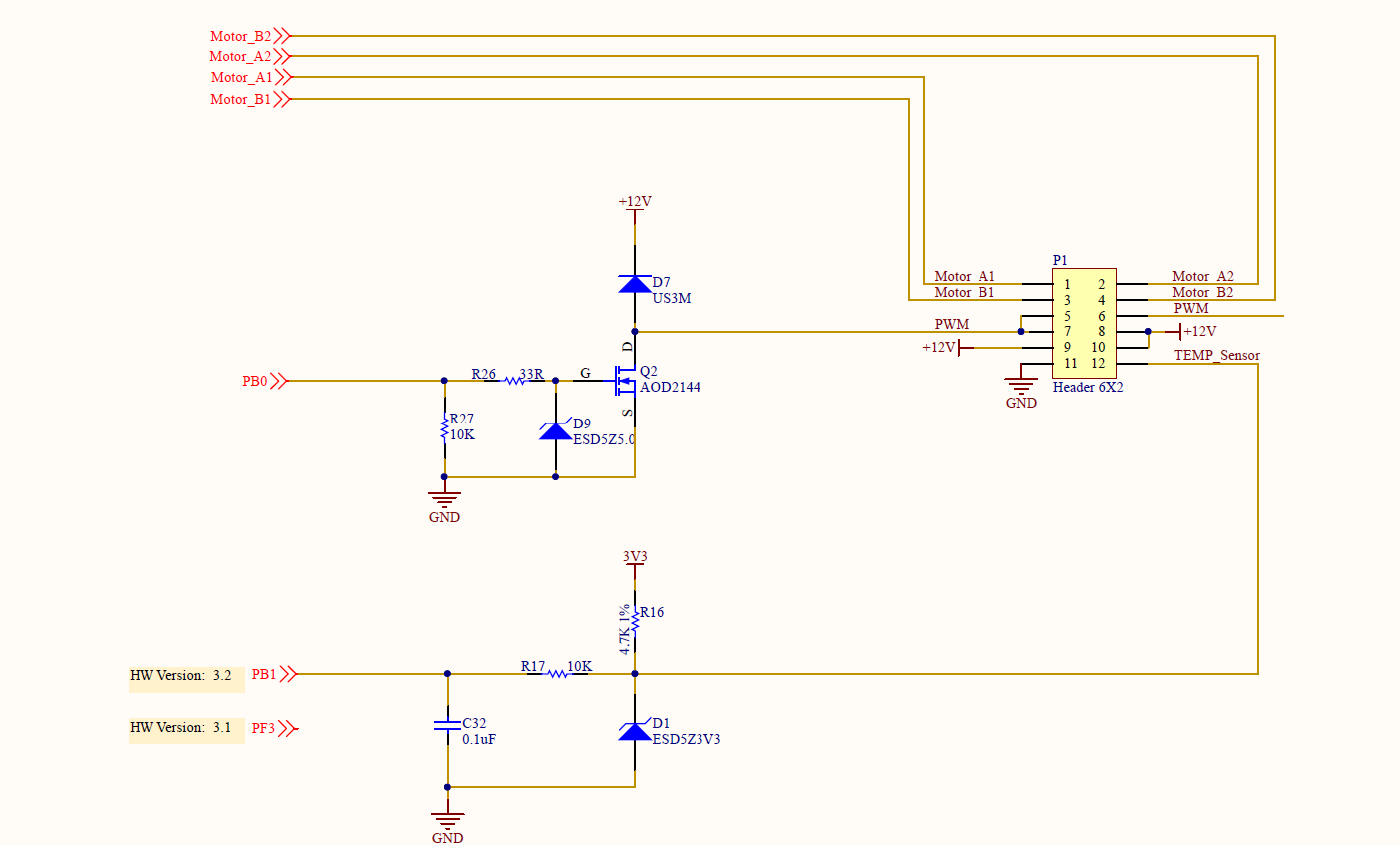
1 x 12-pin motor port for 3D printing extruder, conveyor belt and linear rail
2 x USB type-c ports for serial communication to control other accessories such as touchscreen and air pump box.
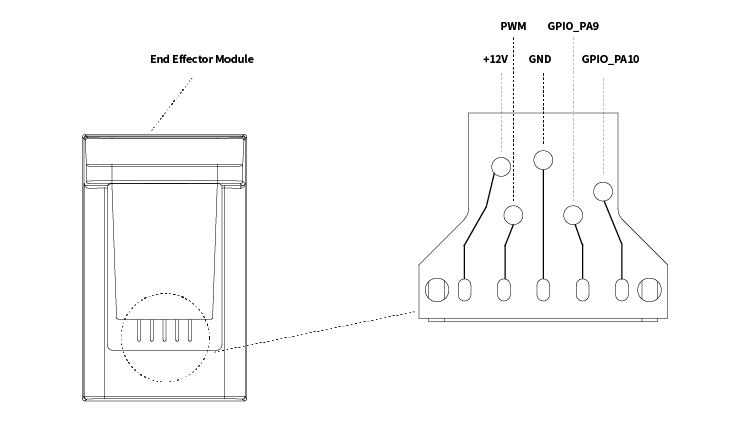
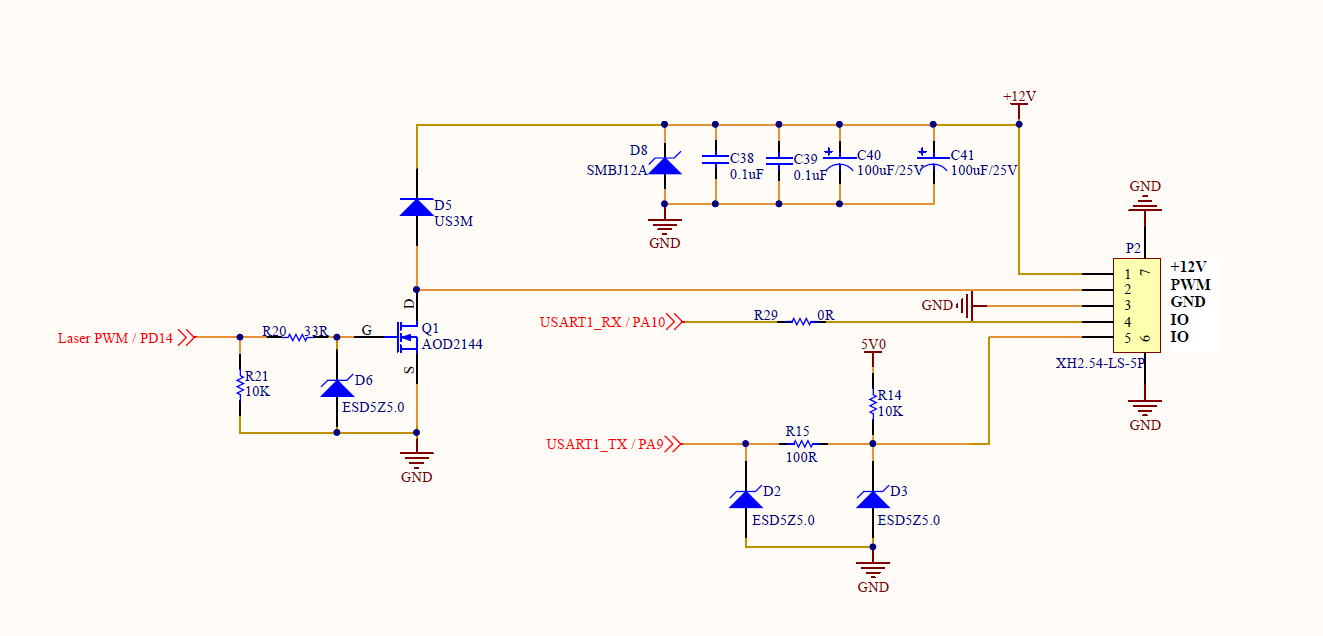
1 x 5-pin header communication port for 3D printing cooling fan, laser engraving module and the upcoming pneumatic rotating module.
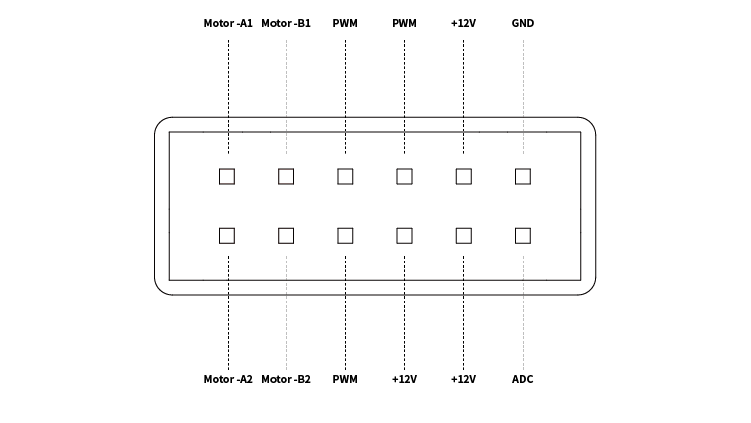
Motor-A1, B1, A2, B2: for 4-wire stepper motor
PWM x 3: three control interfaces for PWM communication, using the same PWM signal
+12 x 3: for 12V power
GND
ADC
Note: The blank ports including A5, A8, B8, B5 are disconnected to the main board.
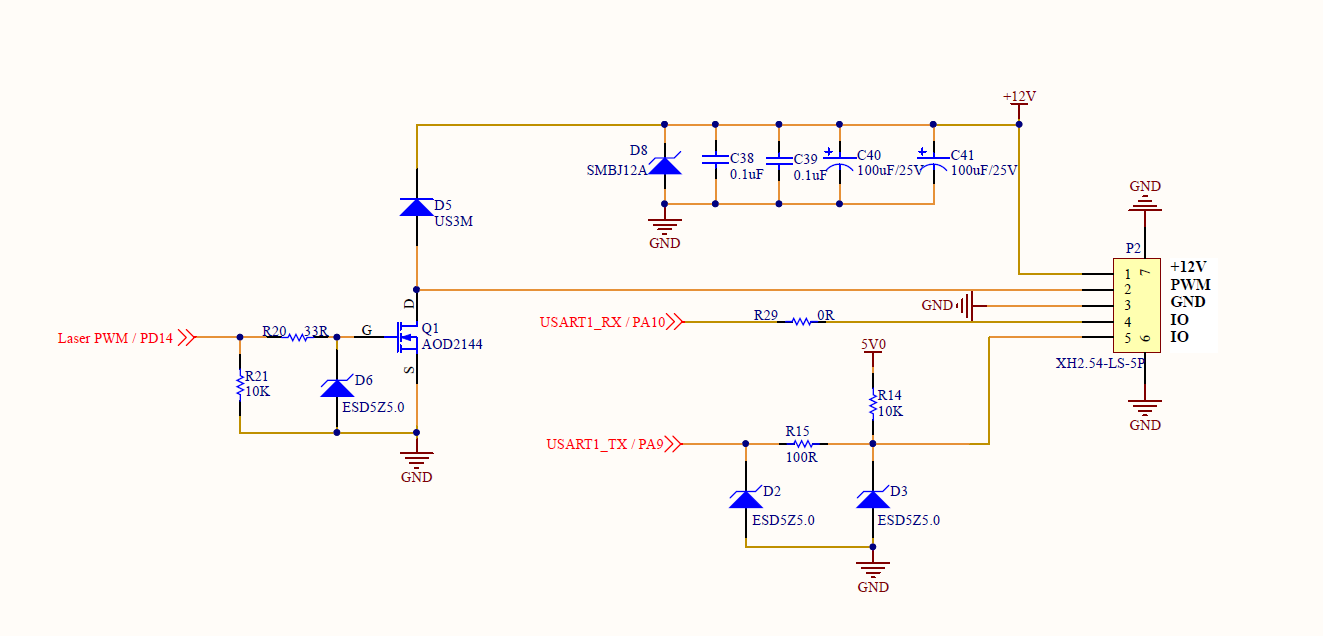
Schematic
The 5-pin module port is to control different modules' functions, such as laser engraving module, and the rotatable pneumatic module. It can also be used for DIY modules, for example, DIY a higher power laser module.
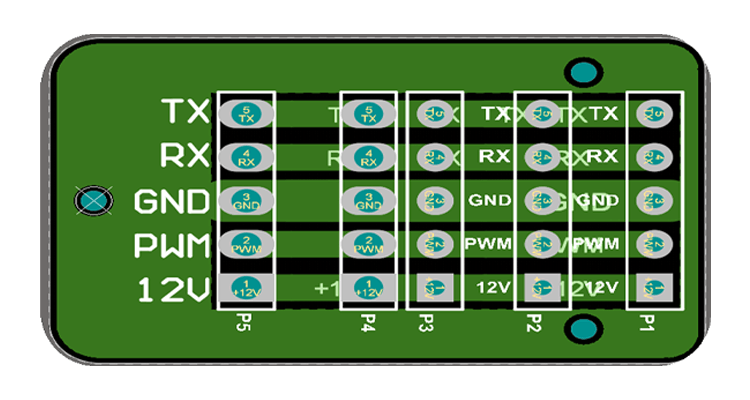
The DIY board is for designing your own module for your DexArm.
TX & RX for Serial communication and I/O control, TX - PA9, RX - PA10. For more details, please refer to the laser module ports schematic below.
PWM is for a 12V PWM control.
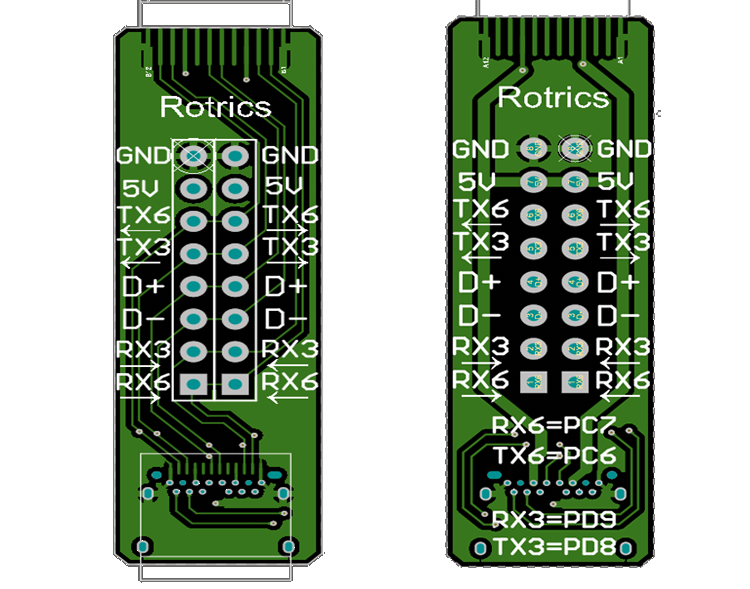
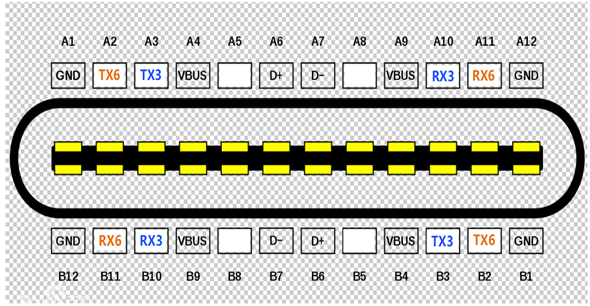
The USB Type-C breakout board is for extending DexArm's I/O communication capability so that we can communicate with an external MCU such as Arduino, Rasberry Pi and OpenMV. Or you can use the RX6, TX6, RX3, TX3 for I/O control.
When doing serial communication, use RX3, TX3 as a pair, or use TX6 with RX6 as a pair.
When doing I/O control, RX6=PC7, TX6=PC6, RX3=PD9, TX3=PD8.
🧠Note: Please DO NOT use the D+ and D- as I/O ports or this board will not able to communicate with your PC.
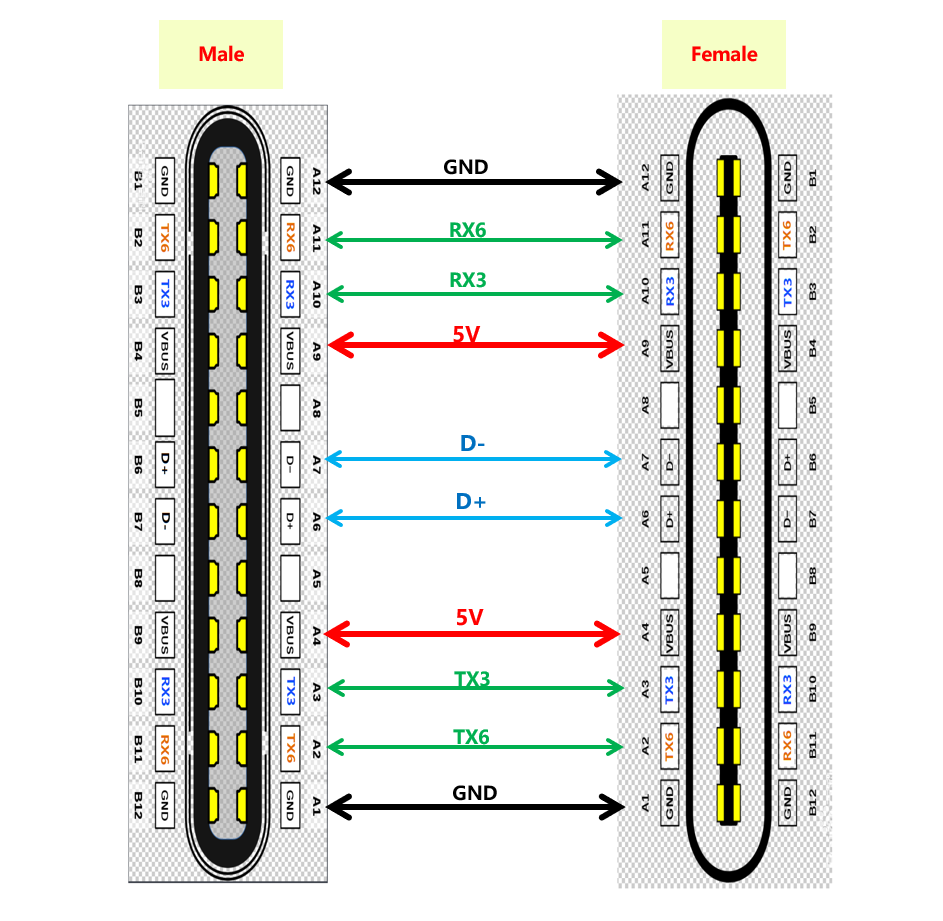
USB Type-C Pinout
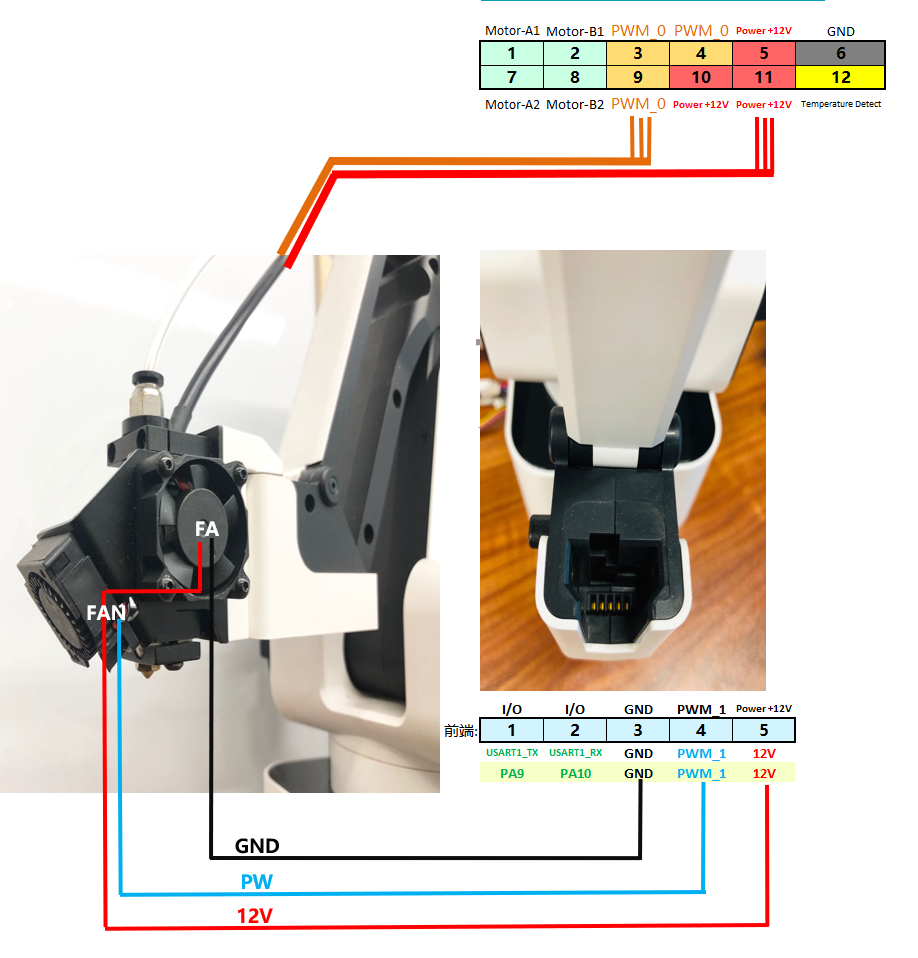

The laser power and the front fan of the 3D printing module are controlled by the same PWM. Both M3 S255 or M106 S255 can make the laser or 3D printing front fan run at full power.
When your laser module fails, you can check the front fan of the 3D printing module. If the front fan of the 3D printing module can work normally, it may be a problem with the laser module. On the contrary, it may be that the front-end cable of Dexarm is off or the motherboard is defective.
3D printing module
Front end modules including laser module and future rotation module.
Please follow these steps to install/Change modules:
❗Notice: Do turn off the power before changing modules.
❗Notice: The module may clamp over the end-effector mount tightly.
❗Notice: Please wait aboutfive minutesto let the nozzle cool down before detaching the 3D printing module.
Clean the footpads often to ensure the best fix results.
At least turn the Robot Arm on once every month to activate the motor and keep the precision.
Place the arm on a clean and flat surface to achieve optimal results.
Cover the arm when you don't use it to avoid dust.
If there is any problem, please contact us via - support@rotrics.com