Get Help
Line Following
Introduction
Sparki can use the sensors below the hands to sense edges and lines. In this tutorial you’ll have Sparki follow a line.What You’ll Need
- A Sparki.
- A path line for it to follow, like the poster in ArcBotics’ Sparki Materials Packs:
 Note: If you make your own line path and the lines aren’t dark enough, or the material is too reflective in general, Sparki may become confused. Try something with more contrast and less reflectivity, or change the threshold in the code.
Note: If you make your own line path and the lines aren’t dark enough, or the material is too reflective in general, Sparki may become confused. Try something with more contrast and less reflectivity, or change the threshold in the code.
How It Works
Sparki has an array of infrared sensors underneath that it uses to detect if there are lines below it. We’re going to program Sparki to follow the dark lines in our path, since they are printed over a more reflective background (typically, the path is printed in dark black, over a white background).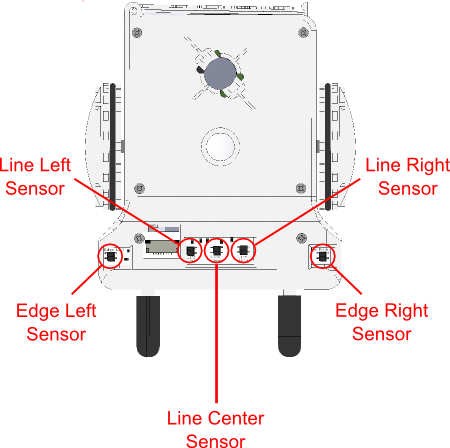 Infrared reflectance sensors can be thought of as an infrared light (which humans can not see), and some special eyes that look at that light. The eyes are made out of a special photo sensing material and an infrared LED (or Light Emitting Diode):
Infrared reflectance sensors can be thought of as an infrared light (which humans can not see), and some special eyes that look at that light. The eyes are made out of a special photo sensing material and an infrared LED (or Light Emitting Diode):
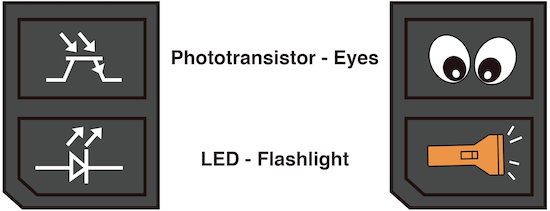
Here are the parts again, but with pictures showing what you’d normally think of them as!

Following a Line
So, let’s use these sensors to make the Sparki to follow printed lines in the floor.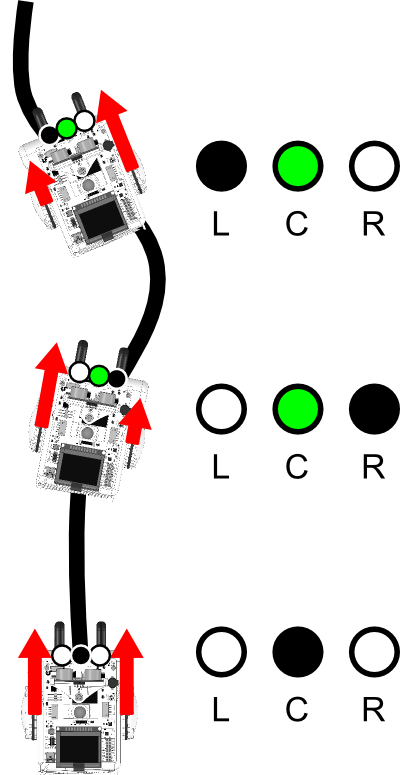 This code requires integers, variables, basic programming, wheel code, if statements and infrared reflector sensors. The readings from the infrared sensors will be sent to the LCD display so we can have a better idea of what is happening inside Sparki’s brain:
This code requires integers, variables, basic programming, wheel code, if statements and infrared reflector sensors. The readings from the infrared sensors will be sent to the LCD display so we can have a better idea of what is happening inside Sparki’s brain:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 |
/******************************************* Sparki Line-following example Threshold is the value that helps you determine what's black and white. Sparki's infrared reflectance sensors indicate white as close to 900, and black as around 200. This example uses a threshold of 500 for the example, but if you have a narrow line, or perhaps a lighter black, you may need to adjust. ********************************************/ #include <Sparki.h> // include the sparki library void setup() { } void loop() { int threshold = 500; int lineLeft = sparki.lineLeft(); // measure the left IR sensor int lineCenter = sparki.lineCenter(); // measure the center IR sensor int lineRight = sparki.lineRight(); // measure the right IR sensor if ( lineLeft < threshold ) // if line is below left line sensor { sparki.moveLeft(); // turn left } if ( lineRight < threshold ) // if line is below right line sensor { sparki.moveRight(); // turn right } // if the center line sensor is the only one reading a line if ( (lineCenter < threshold) && (lineLeft > threshold) && (lineRight > threshold) ) { sparki.moveForward(); // move forward } sparki.clearLCD(); // wipe the screen sparki.print("Line Left: "); // show left line sensor on screen sparki.println(lineLeft); sparki.print("Line Center: "); // show center line sensor on screen sparki.println(lineCenter); sparki.print("Line Right: "); // show right line sensor on screen sparki.println(lineRight); sparki.updateLCD(); // display all of the information written to the screen delay(100); // wait 0.1 seconds } |
 Congrats! You have programmed Sparki to follow a line!
Congrats! You have programmed Sparki to follow a line!
Extra Activities
- Of course, there are other techniques to follow lines with a robot, such as with two sensors instead of three, or even with one! Why not take a look out there in the Internet to see if you can find new ways of doing this?
- If the line forks, which way will Sparki turn? Is there a way you can give it directions with the remote as it comes to a split in the road? Are there ways you could have Sparki tell you when it has reached a branching path?
- What about following a line that is wider than the distance between the left and the right sensor?
Lesson Available for the miniBloq Programming Environment
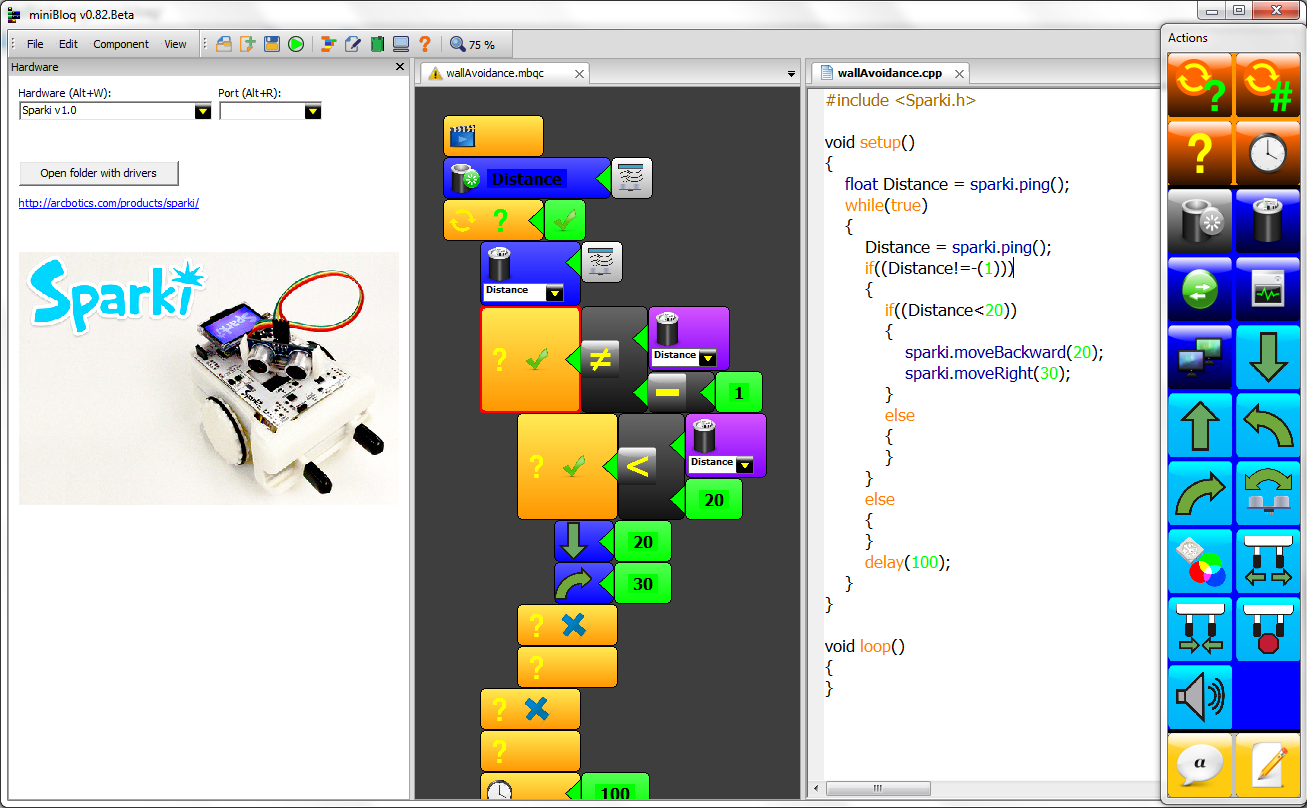 This lesson is also available for the miniBloq Programming Environment. miniBloq is a graphical programming environment that you can use to easily program your Sparki.
This lesson is also available for the miniBloq Programming Environment. miniBloq is a graphical programming environment that you can use to easily program your Sparki.