Get Help
Gripper
Sparki has two little grippers that can grab objects and drag them around.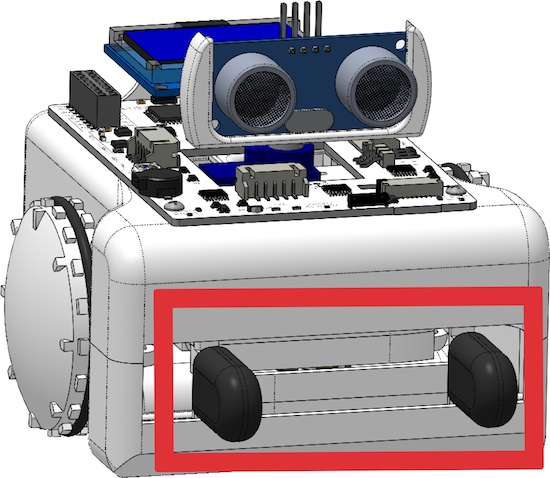
How It Works
Sparki’s grippers are driven by the same stepper motor that the wheels use. The grippers are driven by rack and pinion style gear. For Sparki, each arm is a rack, and the stepper motor has the gear:
Using the Part
With the basic Sparki code in place, you can move the gripper using these commands:|
1 2 3 4 5 |
sparki.gripperOpen(); // opens the grippers sparki.gripperOpen(width_cm); // opens the grippers by width_cm centimeters sparki.gripperClose(); // closes the grippers sparki.gripperClose(width_cm); // closes the grippers by width_cm centimeters sparki.gripperStop(); // stops the gripper from moving |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
/******************************************* Basic Gripper test Sparki has two little grippers it can be used to grab objects and drag them around. See what you can grab with them! http://arcbotics.com/products/sparki/parts/gripper/ ********************************************/ #include <Sparki.h> // include the sparki library void setup() { } void loop() { sparki.gripperOpen(); // open the robot's gripper delay(1000); // for 1 second (1000 milliseconds) sparki.gripperClose(); // close the robot's gripper delay(1000); // for 1 second (1000 milliseconds) sparki.gripperStop(); // stop the grippers from moving delay(1000); // for 1 second (1000 milliseconds) sparki.gripperOpen(3); // open the robot's gripper by 3 centimeters sparki.gripperClose(3); // close the robot's gripper by 3 centimeters delay(1000); // wait 1 second (1000 milliseconds) } |
