바로 마이크로소프트의 키넥트(Kinect)입니다.

<MS의 키넥트>
키넥트는 마이크로소프트가 2009년 E3 쇼에서 선보인 모션 캡쳐 카메라입니다.
왼쪽의 회절격자에서 적외선으로 이루어진 촘촘한 점을 비추고, 이의 왜곡을 적외선 카메라가 감지해 물체와 키넥트 사이 거리를 탐지하는 방식이죠.
이렇게 알아낸 거리와 카메라로 촬영한 영상을 조합하여 3D 이미지를 만들어내고, 이를 이용해 사람 몸의 움직임을 측정합니다.
심지어, 엑스박스 원과 함께 출시된 키넥트 2는 1080p 영상 녹화와 심장 박동수 감지, 손가락의 움직임과 표정 변화까지 감지합니다.(
얼마 전에, 흔한 공돌이의 쓰레기통.avi 라는 이름으로 돌아다니던, 쓰레기를 자동으로 받는 쓰레기통에 대한 유튜브 영상 또한, 키넥트를 이용해 쓰레기를 추적합니다.
<스마트 쓰레기통>
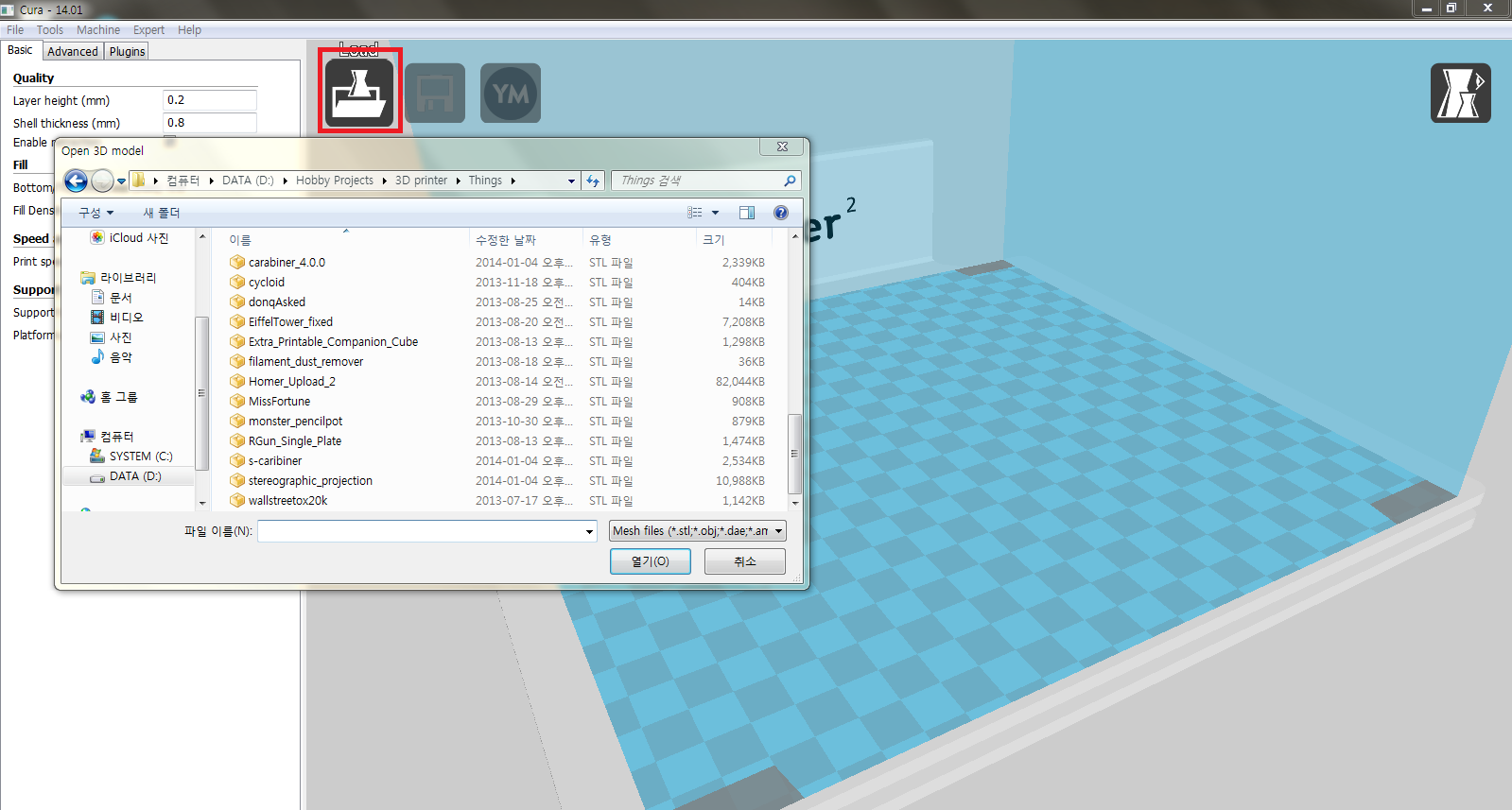
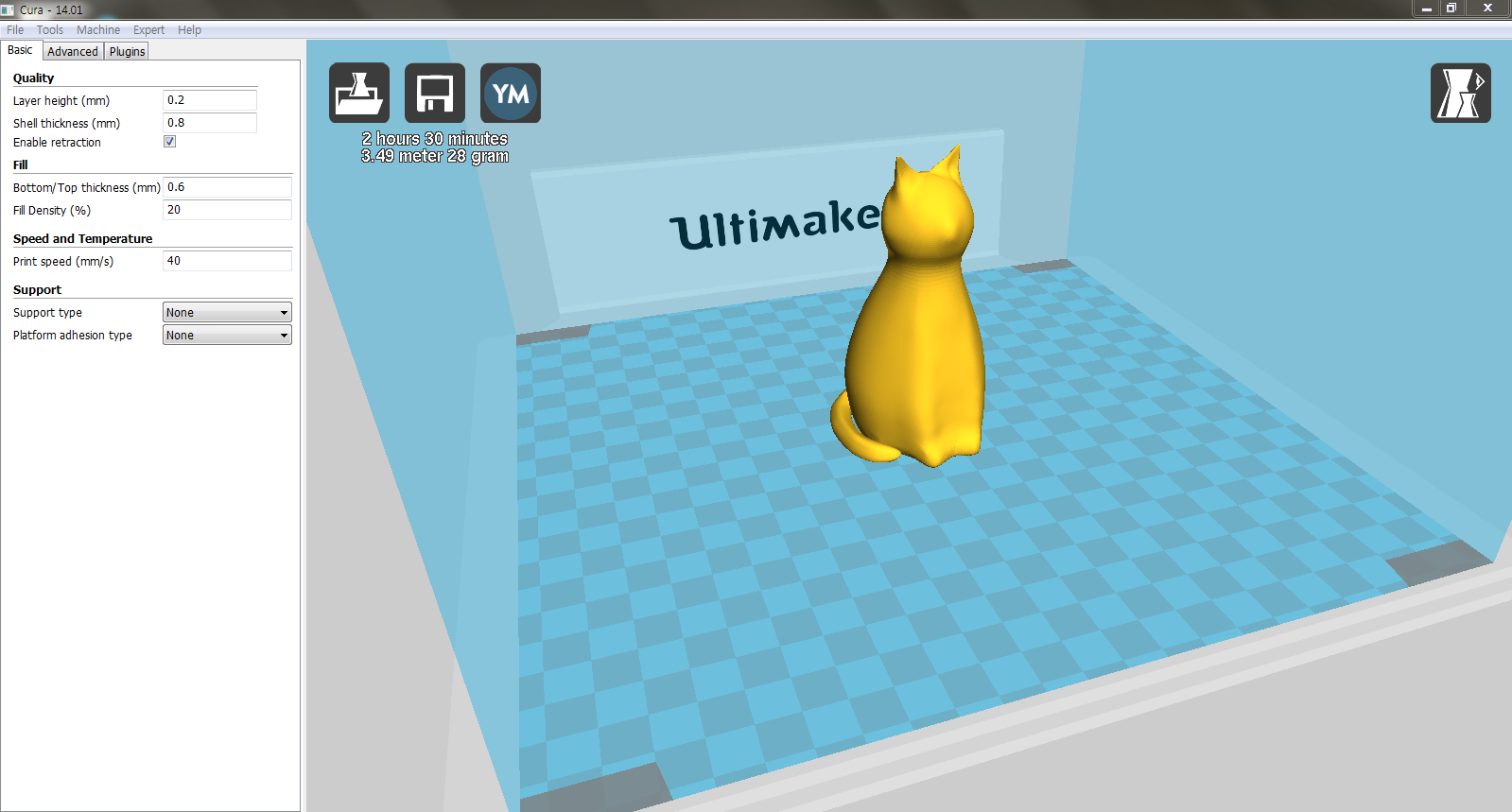
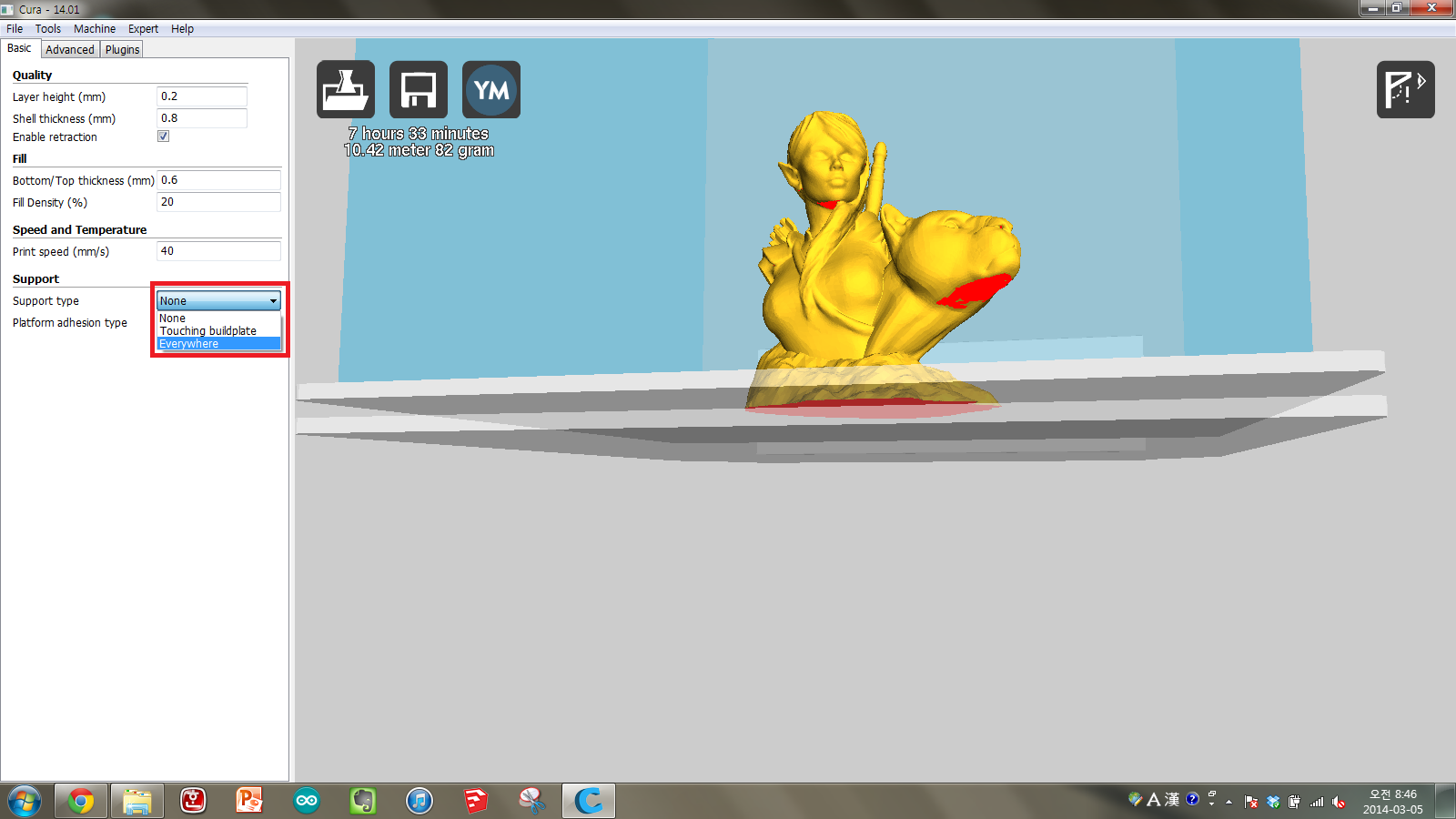
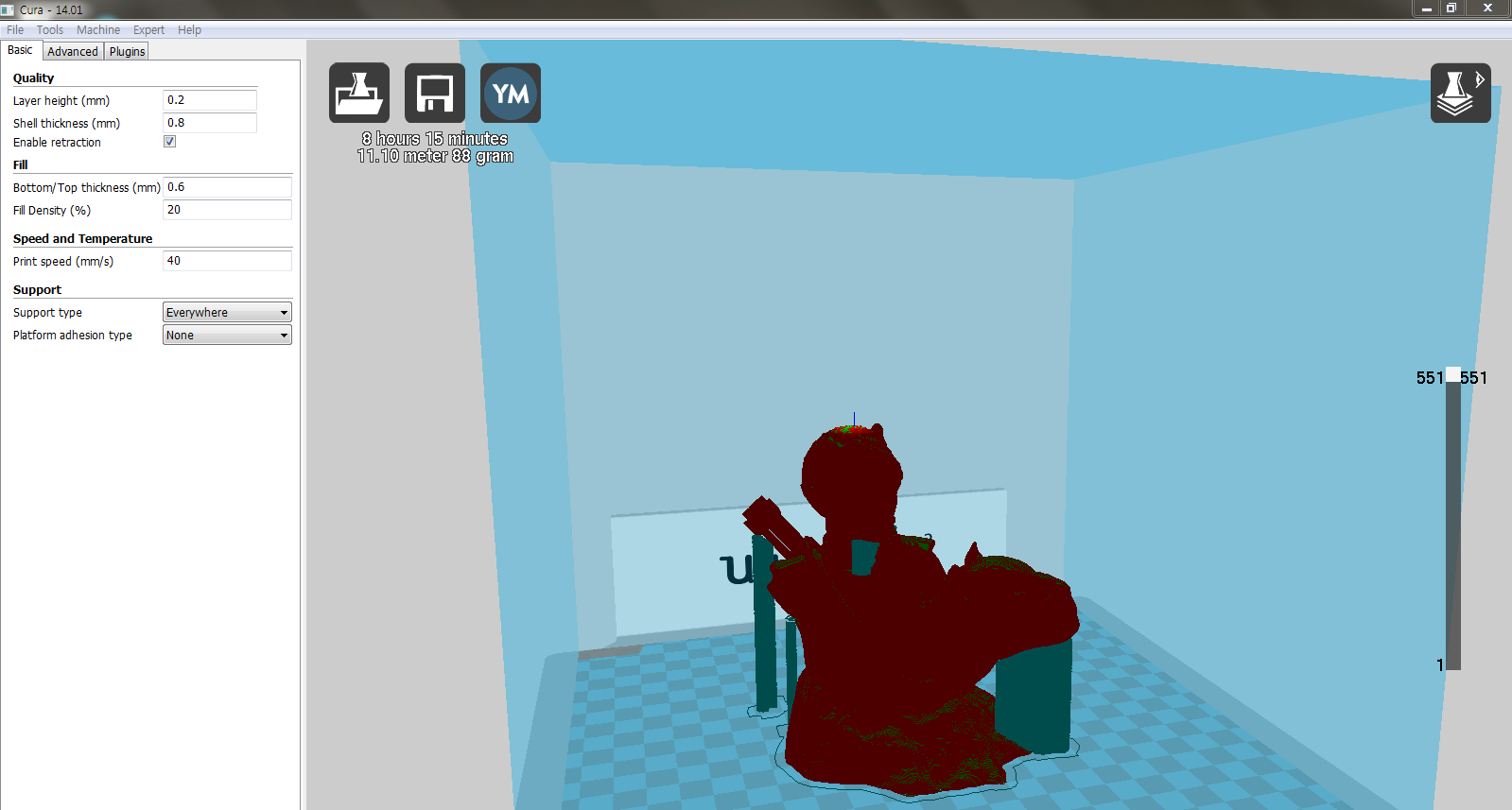
여튼, 키넥트가 3D로 물체를 촬영한다는 것에서 착안해, 키넥트를 이용하여 3D 스캐닝을 하는 사람들이 등장했습니다.
대표적인 소프트웨어로는 ReconstructMe 가 있습니다. 무료 소프트웨어니까 윈도우용 키넥트가 있는 사람은 한번 해 보시는 것도 좋겠습니다.
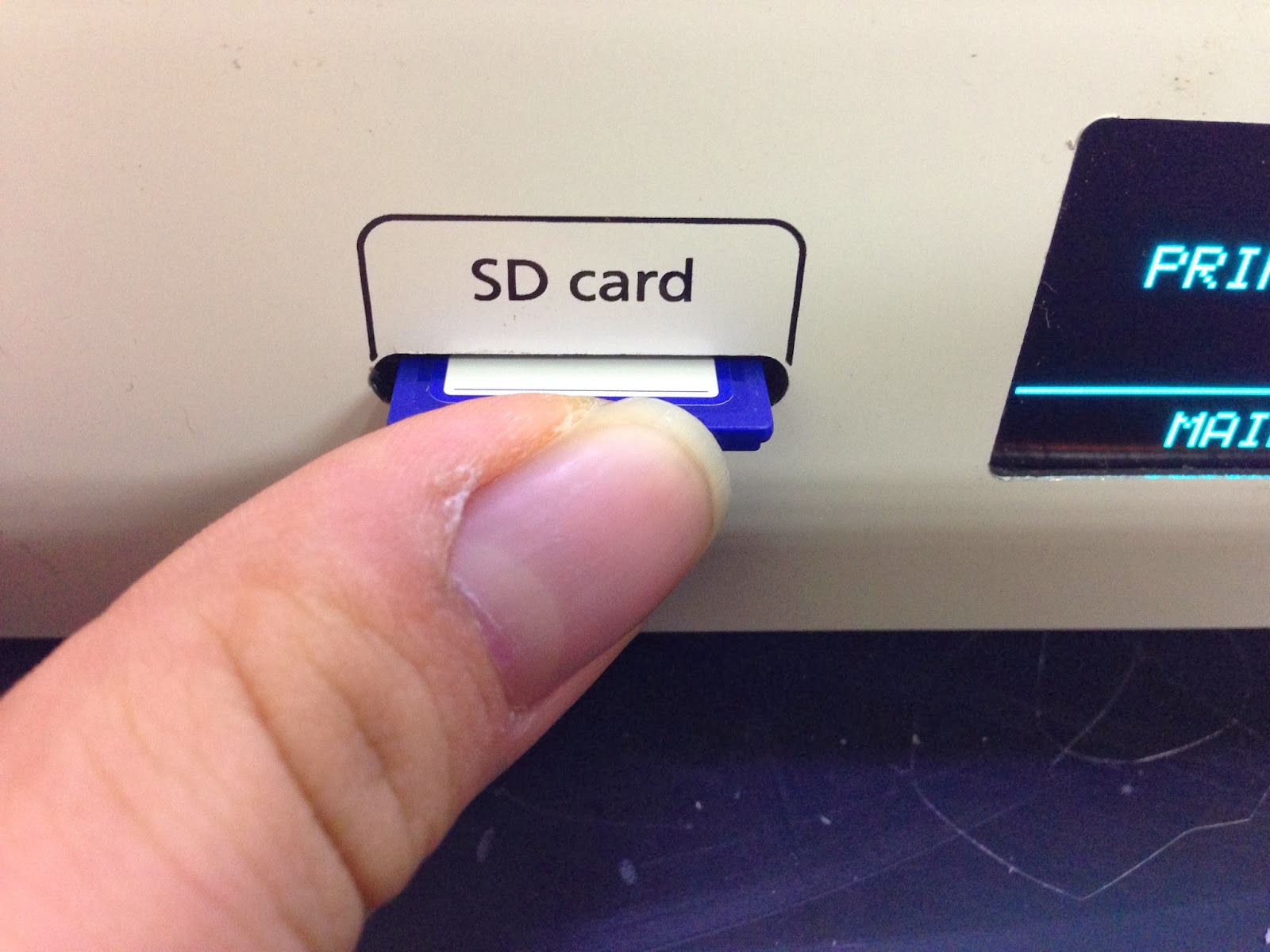
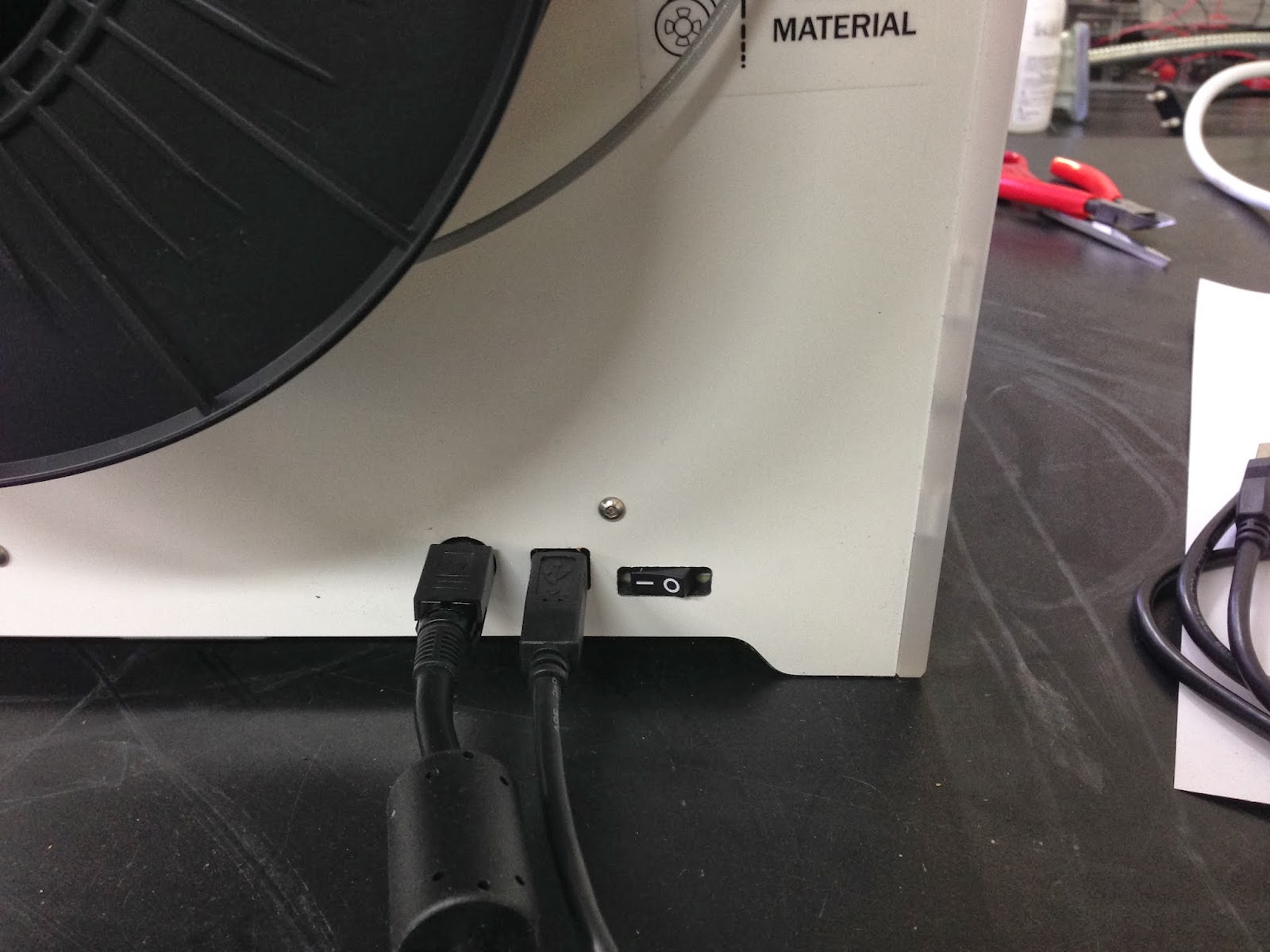
저 또한 키넥트의 3D 스캐닝 기능을 이용해, 기술창업 올림피아드에서 발바닥을 3D로 스캐닝한 후 이를 이용해 발에 딱 맞는 깔창을 만들었습니다.
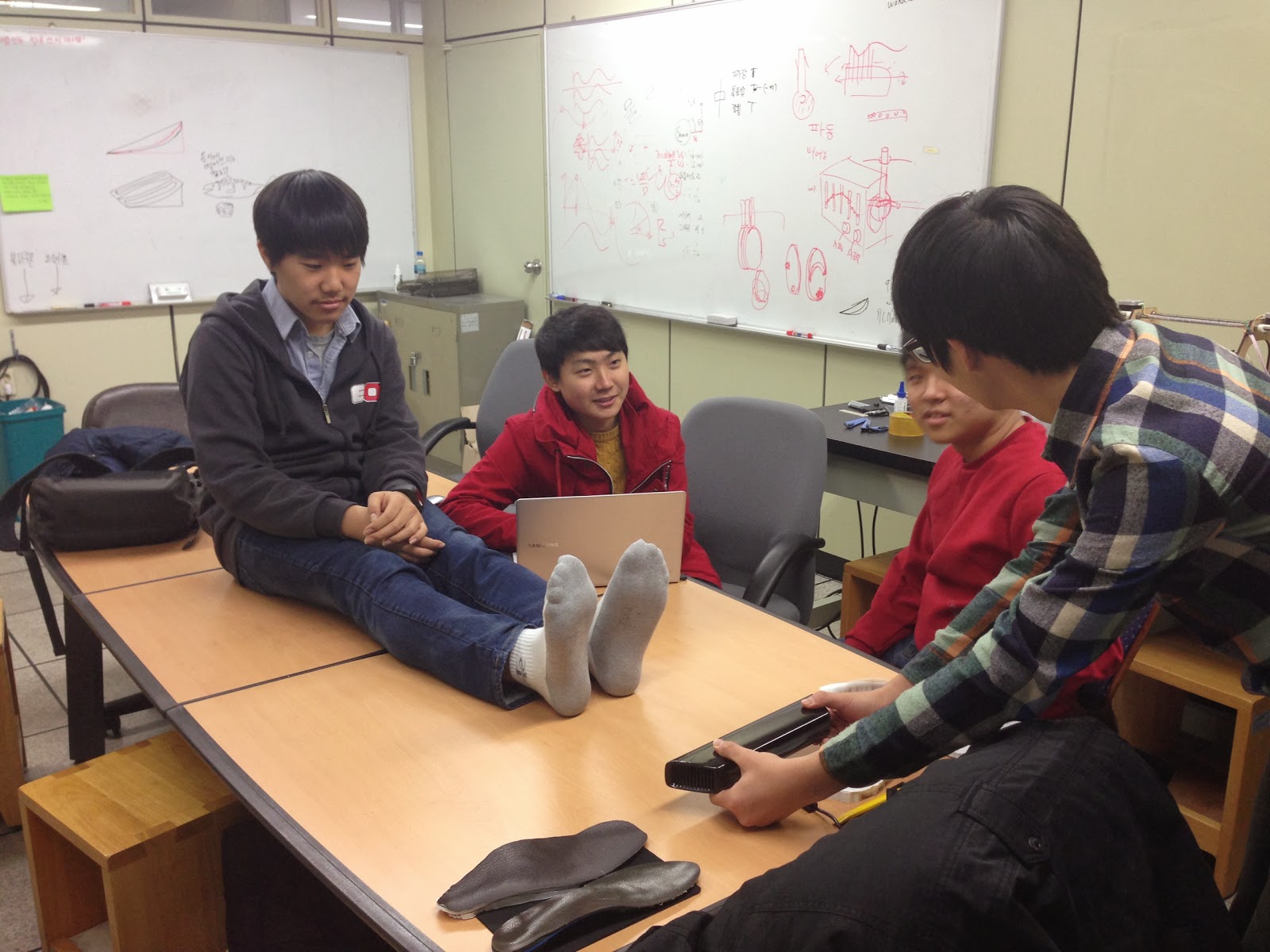
<당시 키넥트로 발을 스캐닝하던 모습>
이 외에도, 키넥트를 드론 위에 설치하고 드론을 움직여 건물의 3D 데이터를 만드는 연구도 진행되었죠.
<상기 내용의 TED 영상>
이렇게, 키넥트는 모션 캡쳐와 3D 스캐닝에 큰 족적을 남깁니다. Leap Motion같은 모션캡쳐 장비나 3D systems의 Sense와 같은 3D 스캐너는 키넥트가 없었더라면 만들어지기 힘들었을 것입니다.


<Leap Motion과 Sense 3D Scanner>
구글은 세상의 모든 정보를 모으려고 하죠.
세상의 3D 데이터를 모으기 위해, 구글은 키넥트의 기술을 활용합니다.
이것이 바로 프로젝트 탱고(Project Tango)입니다.
<프로젝트 탱고 소개 영상>
영상에서 나오듯이, 이 기술을 이용하면 오토포커싱이 아주 정밀하고 빠르며, 3D 스캐닝도 할 수 있죠. 나아가 증강현실도 가능합니다.
구글은 이 기능을 아주 멋지게 구현합니다.
아예 키넥트를 스마트폰에 내장시키고, 가속도계와 자이로스코프를 연동시킵니다.
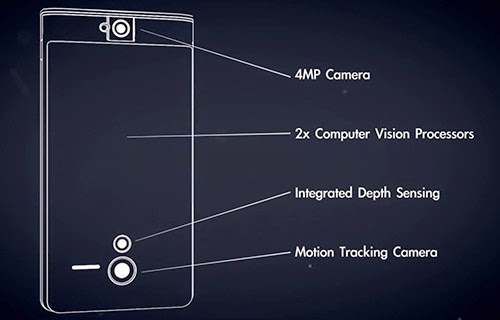
<프로젝트 탱고 프로토타입 스마트폰의 구조>
구글은 이를 이용해 전 세계를 3D 데이터화 하려고 합니다.

<프로젝트 탱고 스마트폰을 이용한 3D 스캐닝>
이를 위한 프로토타입 스마트폰이 개발되었고, 구글 글라스처럼 주요 개발자들에게 배포된다고 합니다. 미래가 아주 기대되는 프로젝트입니다.

<프로젝트 탱고 프로토타입>
이와 같은 3D 스캐닝 기술은 구글만이 구현하고 있는가? 그건 또 아닙니다.
작년 11월 2일, 킥스타터에서 목표 금액인 $100,000 의 1290% 인 $1,290,439 를 성공적으로 펀딩받은 Occipital의 스트럭쳐 센서(Structure Sensor)는 아이패드에 장착하는 3D 스캐너입니다.
<Structure Sensor 킥스타터 소개영상>
스트럭쳐 센서의 원리는 키넥트와 같습니다. 적외선 LED로 특정 패턴을 방사하고, 적외선 카메라로 이의 왜곡을 감지하여 주변을 3D로 재구성하는 것이죠.

<적외선 LED>
스트럭쳐 센서는 이를 이용해 물건과 공간을 3D로 스캐닝할 수 있고, 정밀한 증강현실도 구현할 수 있습니다.

<물체 3D 스캐닝>

<공간 스캐닝>
제가 가장 좋아하는 잡지, 파퓰러 사이언스에서는 기사에서 스트럭쳐 센서를 극찬하기도 했습니다.
3D 프린터 명가. 3D 시스템즈에서는 자사 상표인 Sense를 붙여 이를 판매하려는 계획을 세우고 있죠.
<iSense>
스트럭쳐 센서 제조사에서는 API를 무료로 배포하고, 심지어 센서를 아이패드에 고정시키는 브래킷의 3D 데이터도 공개하여 어떤 기기에나 연결할 수 있도록 만들었습니다.

<오큘러스 리프트와 연동시킨 스트럭쳐 센서>
또한, 스트럭쳐 센서는 기본적으로 윈도나 맥, 리눅스 등에서도 구동 가능하게 만들어져 있습니다.
이는 스트럭쳐 센서의 성장에 큰 도움이 될 것이라고 생각됩니다.
저는 3D 프린팅과 3D 스캐닝, 그리고 디지털 제조(Digital Fabrication)에 관심이 많습니다. 그래서 3D 프린터를 두대씩 직접 만들기도 했고, 관련 대회도 출전했으며, 학교에서 연구회를 만들어 활동하기도 했죠.
저는 스트럭쳐 센서가 성장할 것이라고 생각합니다. Sense 3D Scanner를 써보면 스크린에 3D 스캐너가 붙어있는것이 얼마나 좋은지 느낄 수 있습니다.
일단 직관적이고, 편하며, 소스가 잘 공개되어 있죠.
만약 성장하지 못한다고 해도, 저에게는 좋은 도구가 될 것이라고 믿습니다.
그래서 학생 신분에게는 매우 부담스러운 $414를 들이부어(...) Structure Sensor를 프리오더 했습니다.
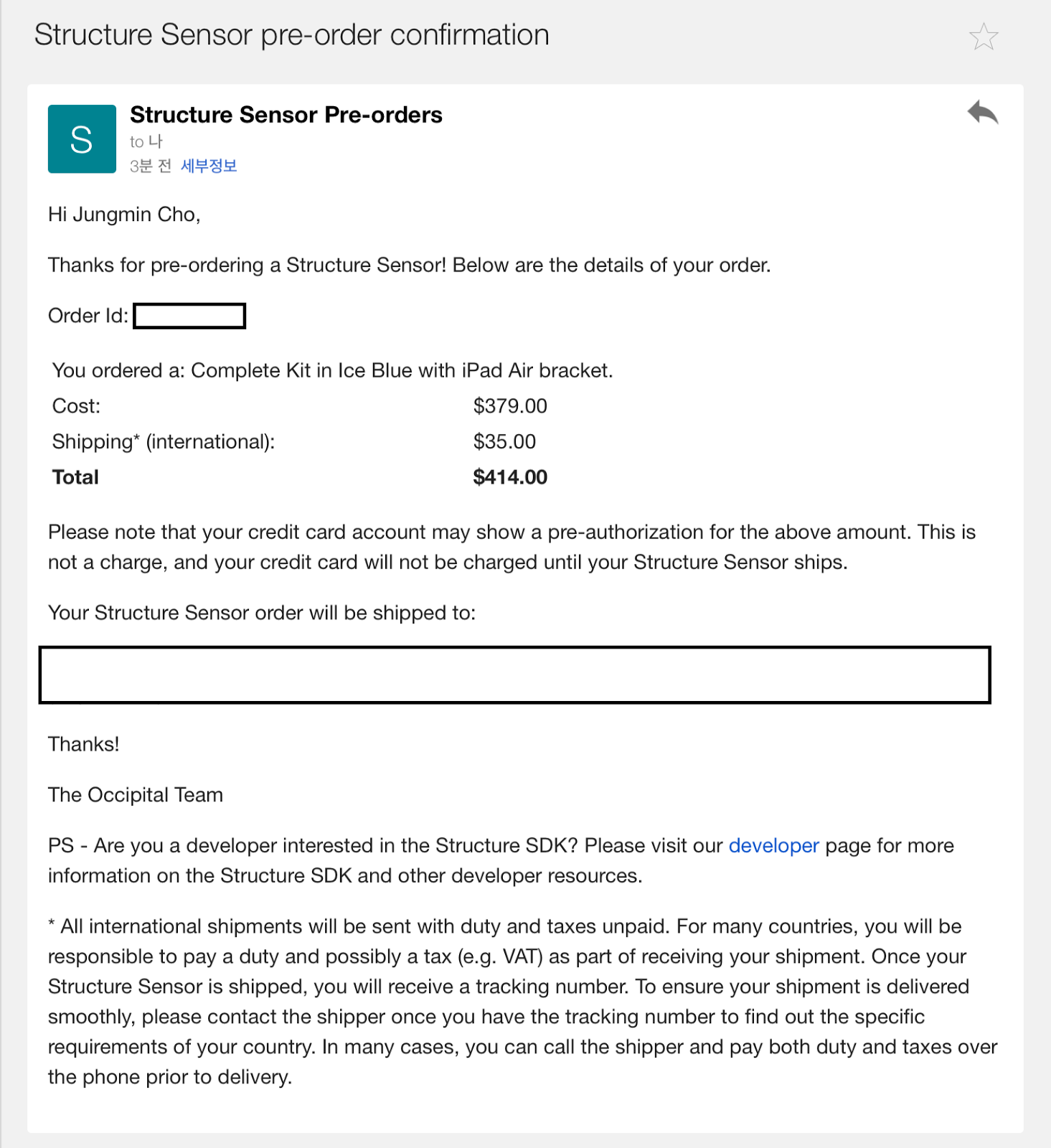
조만간 리뷰하도록 하겠습니다.
긴 글 읽어주셔서 감사합니다.
Appendix
Appendix
<TechCrunch 리뷰>
<The Verge 리뷰>