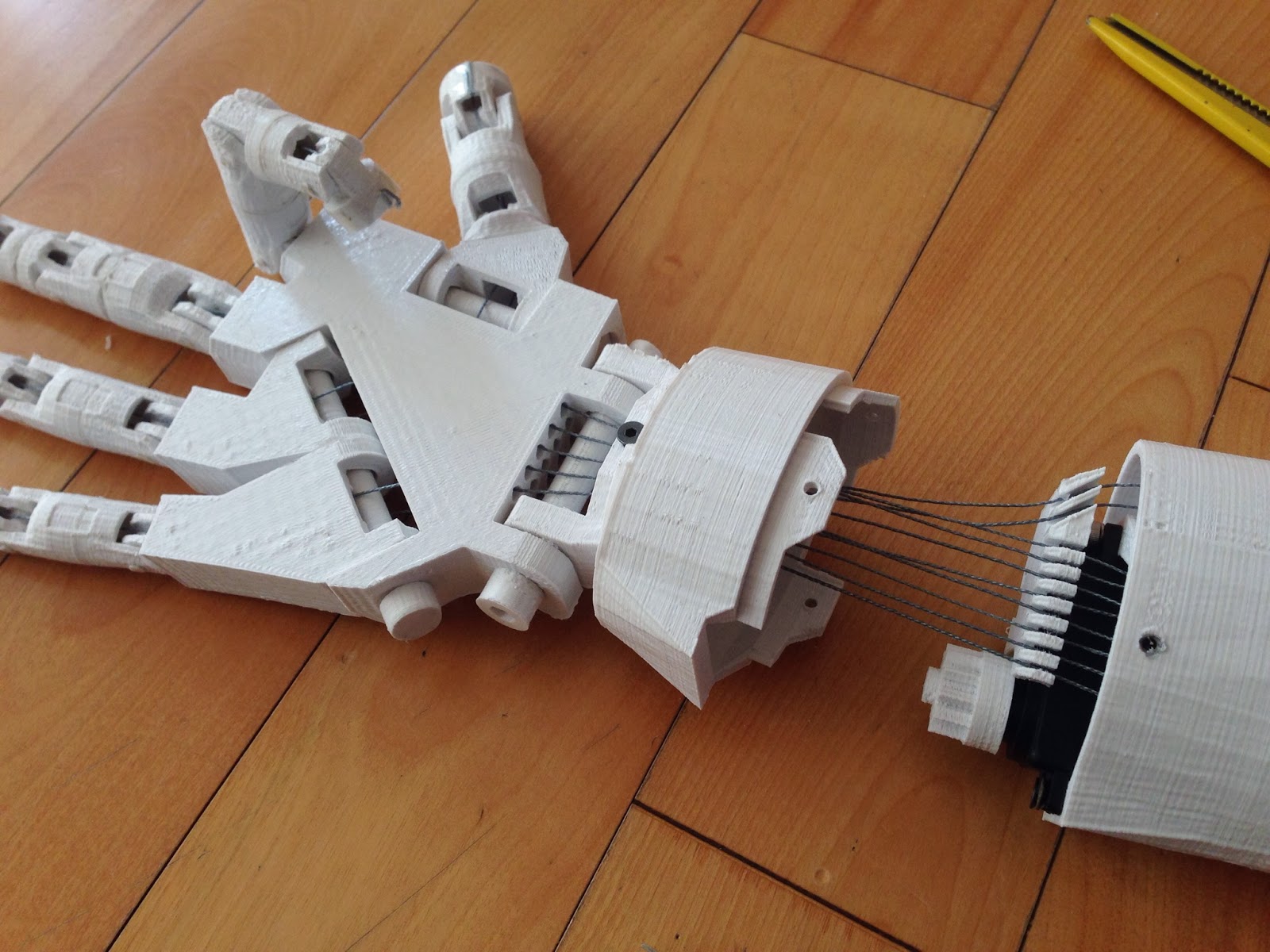
말로 설명하자니 조금 어려운데, 손가락을 굽힐 때, 서보 모터에서 실이 풀리는 길이가 손등쪽으로 들어가는 실이 당겨지는 길이보다 길어서 실이 느슨해집니다.
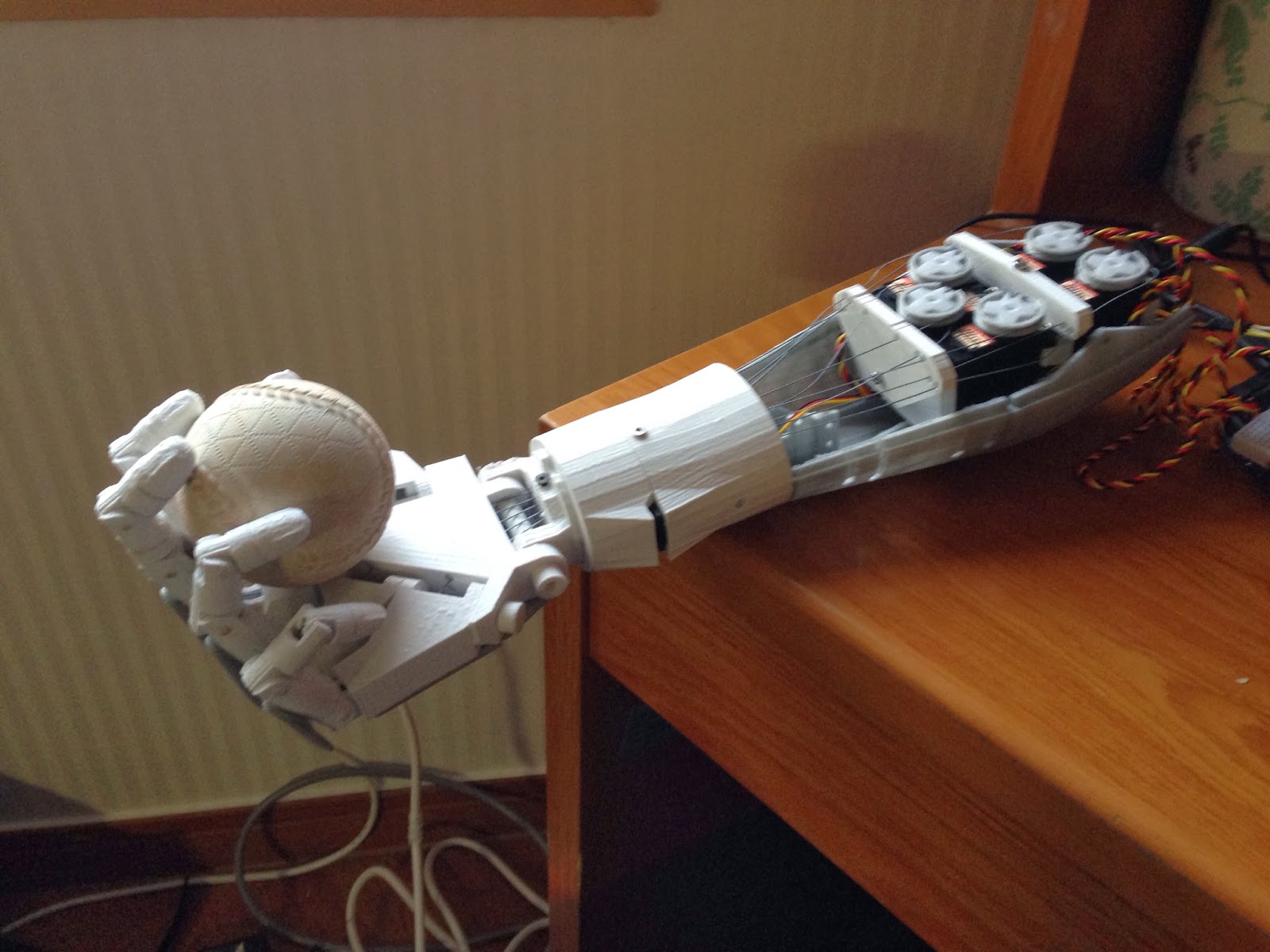
그런데, 이 로봇 의수는 사용 공간을 최소화하기 위해 서보모터에 풀리를 연결해서, 실을 감는 방식입니다.

<로봇 의수 구동방식>
그렇다 보니, 실이 느슨해지면 실이 풀리에 감기지 않아 실을 제대로 당겨주지 못하는 문제가 발생합니다.

<느슨해진 낚싯줄>
이 문제를 해결하기 위해, 실제 우리 팔의 해부학적 구조를 찾아봤습니다.
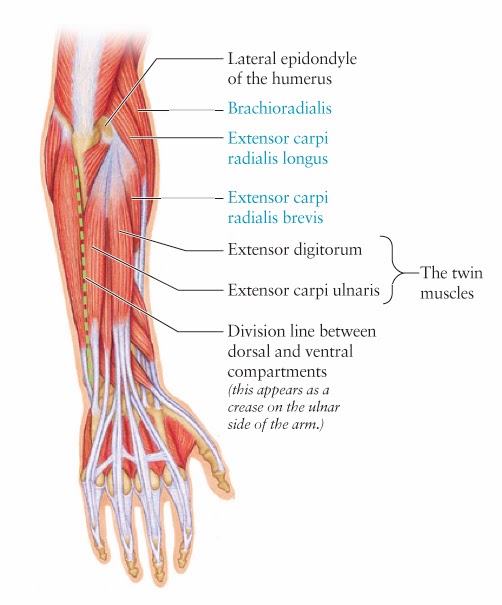
<팔의 해부학적 구조(출처)>
인간의 팔은 손가락을 굽히는 근육과 손가락을 오므리는 근육이 따로 있고, 낚싯줄과는 달리 힘을 전달하는 힘줄에 탄력이 있습니다.
이 중 후자의 원리에서 착안하여, 로봇 의수의 낚싯줄 힘줄에 스프링을 추가했습니다.

<구입한 스프링(구입처)>
이 스프링 판매처도 한국미스미처럼 배송비가 무료라 좋았습니다.
그런데 저런 콩알만한 스프링 10개가 만원에 육박하니...
생각보다 크기가 작으니, 웬만하면 큰 것을 주문하시는게 좋을 것 같습니다. 제가 주문한 규격은 KB1014입니다.
이 스프링을 낚싯줄 중간에 연결해 주었습니다.

<낚싯줄에 연결한 스프링>
처음에는 어떻게 해야 스프링과 실이 견고하게 결합될 지 고민했는데, 스프링의 고리 부분을 플라이어를 이용해 낚싯줄에 꽉 집어 단단히 고정시키고, 순간접착제를 한 방울 떨어뜨리니 낚싯줄에 접착제가 흡수된 상태로 경화되어 단단하게 고정되었습니다.


<스프링의 장력 조절 작용>
효과는 훌륭했습니다. 이처럼 낚싯줄이 풀리더라도 스프링의 길이가 줄어들면서 낚싯줄의 장력을 일정하게 유지시켜 주었습니다.
아두이노를 이용해 10분가량 동작을 반복시켜도 실이 풀리지 않고 정상적으로 작동했습니다.

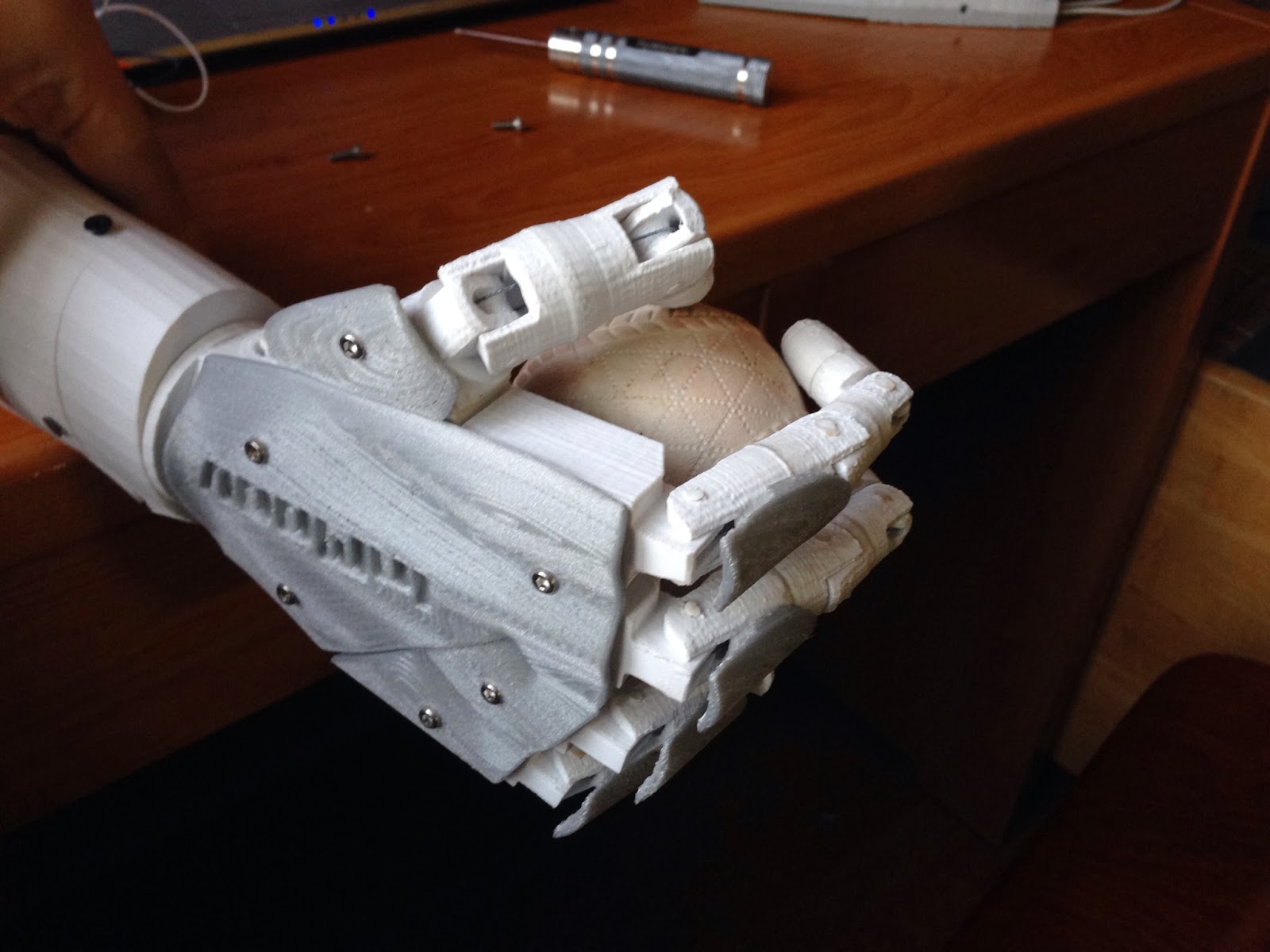
<EVA폼 접착>
마지막으로, 손바닥의 마찰력 증가를 위해 손바닥과 손가락에 EVA폼을 잘라서 붙여주었습니다.
마찰력 뿐 아니라, 보기에도 더 좋아 보입니다.
마지막으로 로봇 의수 작동 영상입니다.