자이지스트 주인장님께 부탁드린 3DR Printed Parts의 인쇄가 완료되어, 프린터를 마저 만들 수 있게 되었습니다.
출력 파트를 찾기 위해 제기동역 근처에 위치한 자이지스트 아지트에 방문했습니다.
<지하철을 타고 자이지스트 아지트로!>
지난 추석연휴에 방문했을때는 정말 애플 썬더볼트 디스플레이 하나 뿐이었는데, 이제 제법 구색을 갖춘 모습을 볼 수 있었습니다.
<한쪽에 장식되어있는 출력물들>
<NP-Mendel과 Pine Tree>
Pine Tree의 히트베드가 고장나는 바람에, NP-Mendel이 혹사당하고 있었습니다.
제가 도착했을 때, 마침맞게도 오픈크리에이터즈의 최종언 대표님(카페 닉네임 스텔스)이 계셔서 짧게 대화를 나눌 수 있었습니다.
방문한 김에 3D systems의 Sense 3D 스캐너로 제 상반신을 스캔해 보았습니다만, 잘 되지 않았습니다.
아직은 많은 발전이 필요해 보입니다.
아지트 방문기는 이 정도로 하고, 슬슬 제작에 들어가도록 하겠습니다.
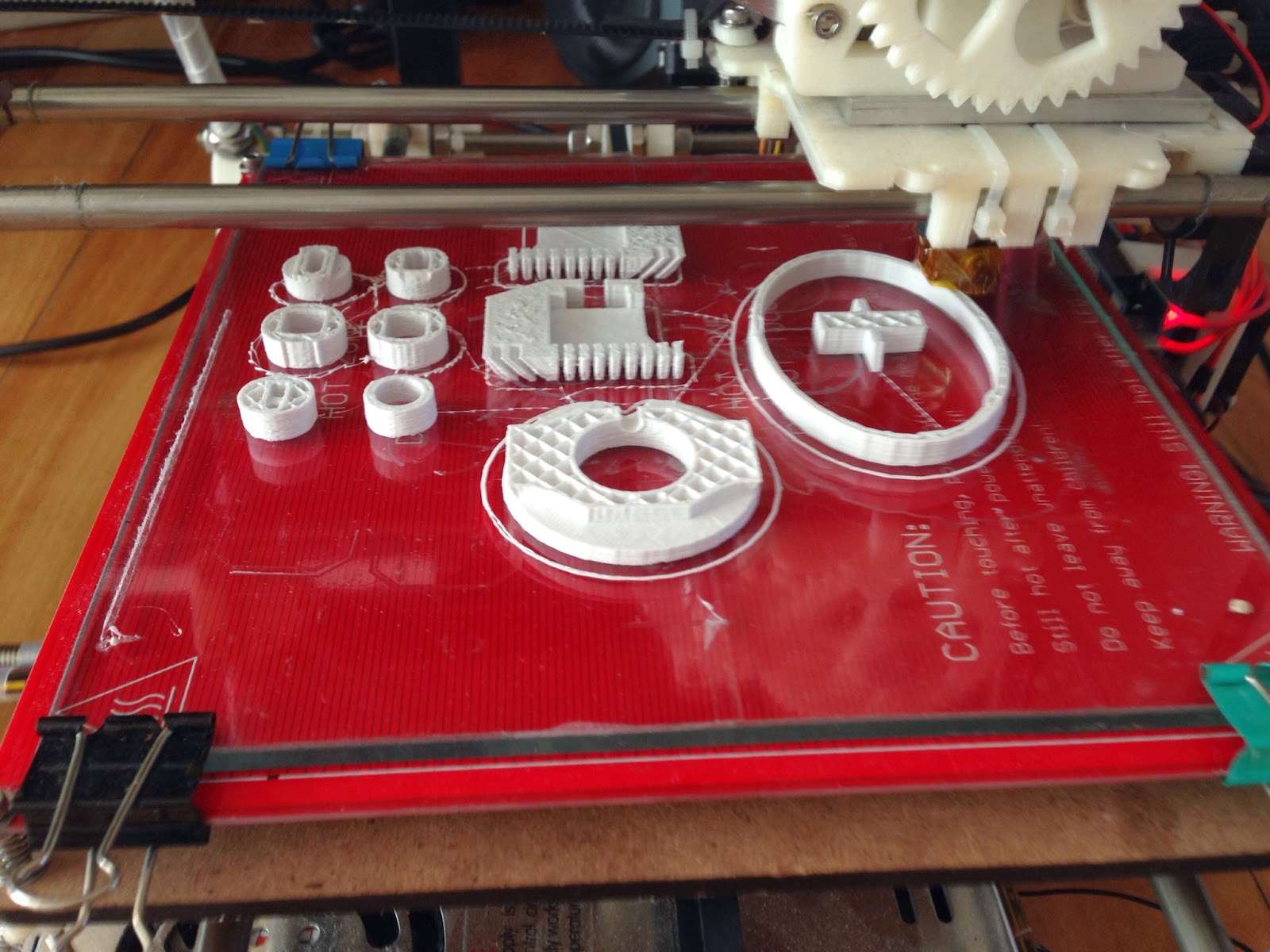
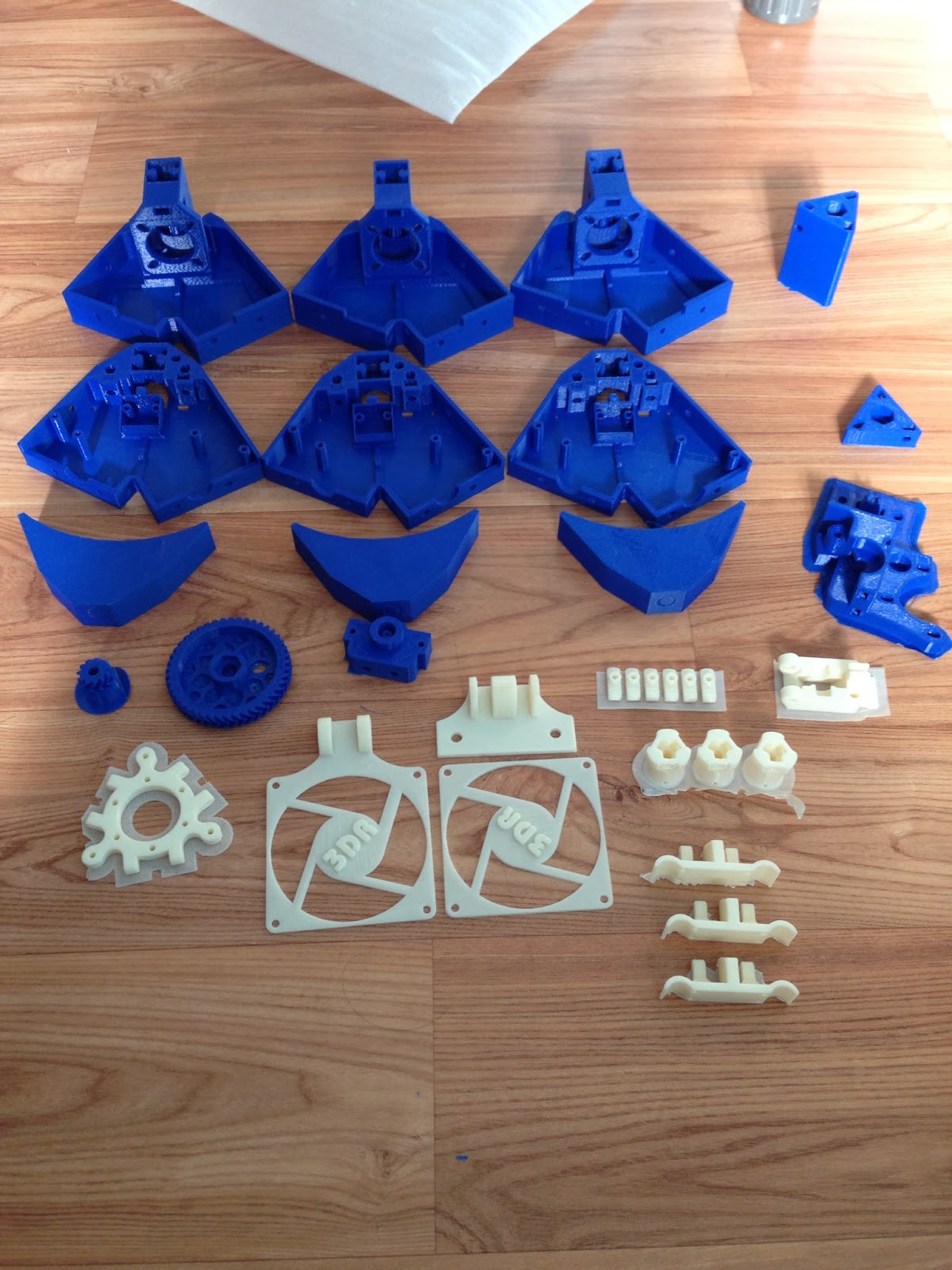
<3DR Printed Parts>
출력물 하나하나의 덩어리가 커서 그렇지, 부품 자체의 개수는 적은 편입니다.
색깔이 참 예쁘군요. 역시 현직 디자이너의 감각은 다릅니다.(그러고 보니 색깔이 은근 자이지스트 홍보용 프린터 같기도....)
저렴한 가격에 부품을 출력해주신 자이지스트 주인장님께 이 자리를 빌어 감사의 인사를 보냅니다.
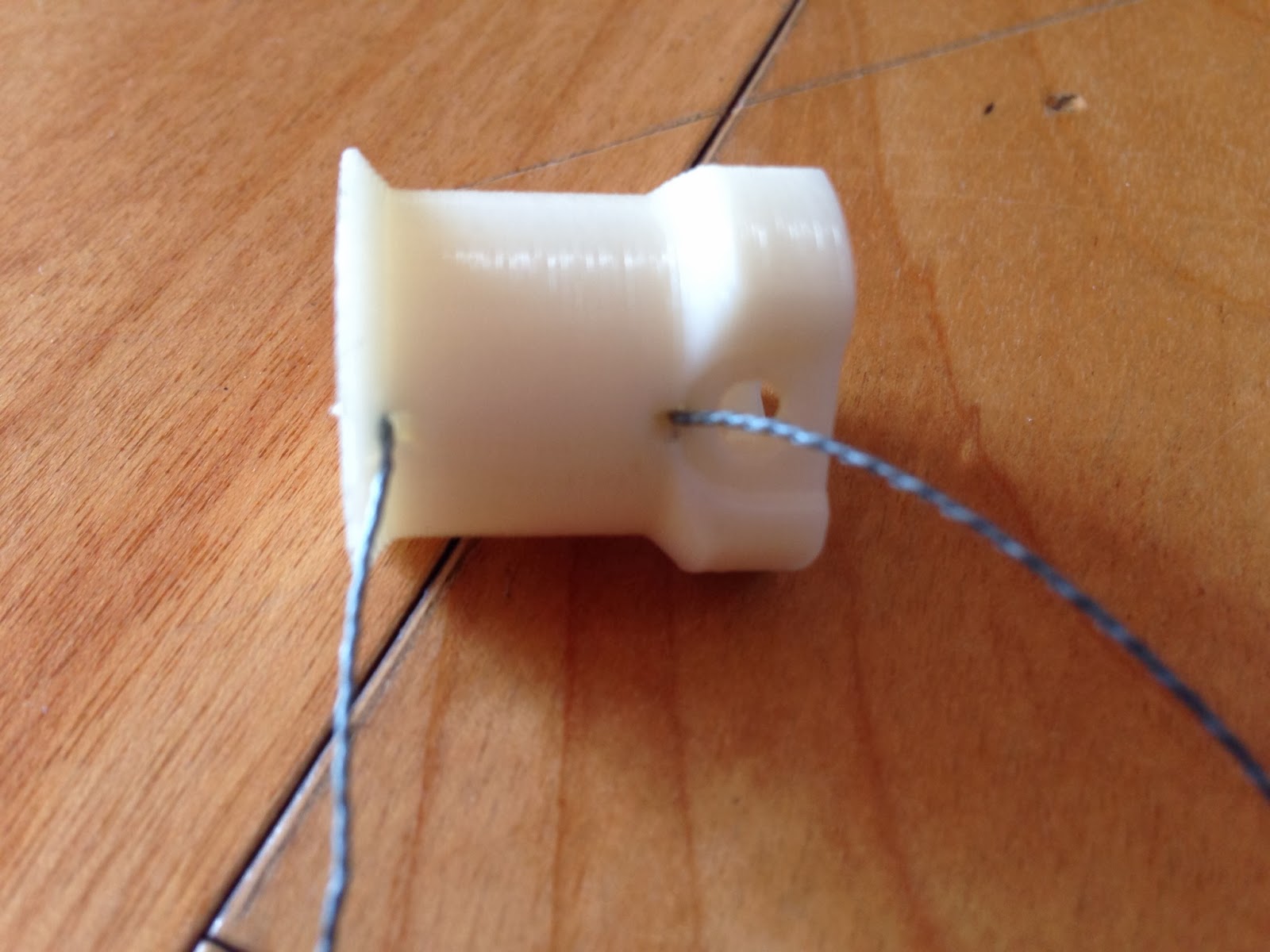
<스풀에 낚싯줄 연결>
가장 먼저, Spool에 낚싯줄을 감아줍니다.
감은 상태로 사진을 찍고 싶었으나, 실을 잡고 있어야 해서 사진을 찍지 못했습니다.
<낚싯줄을 감은 모습(방향에 주의)
(출처)>
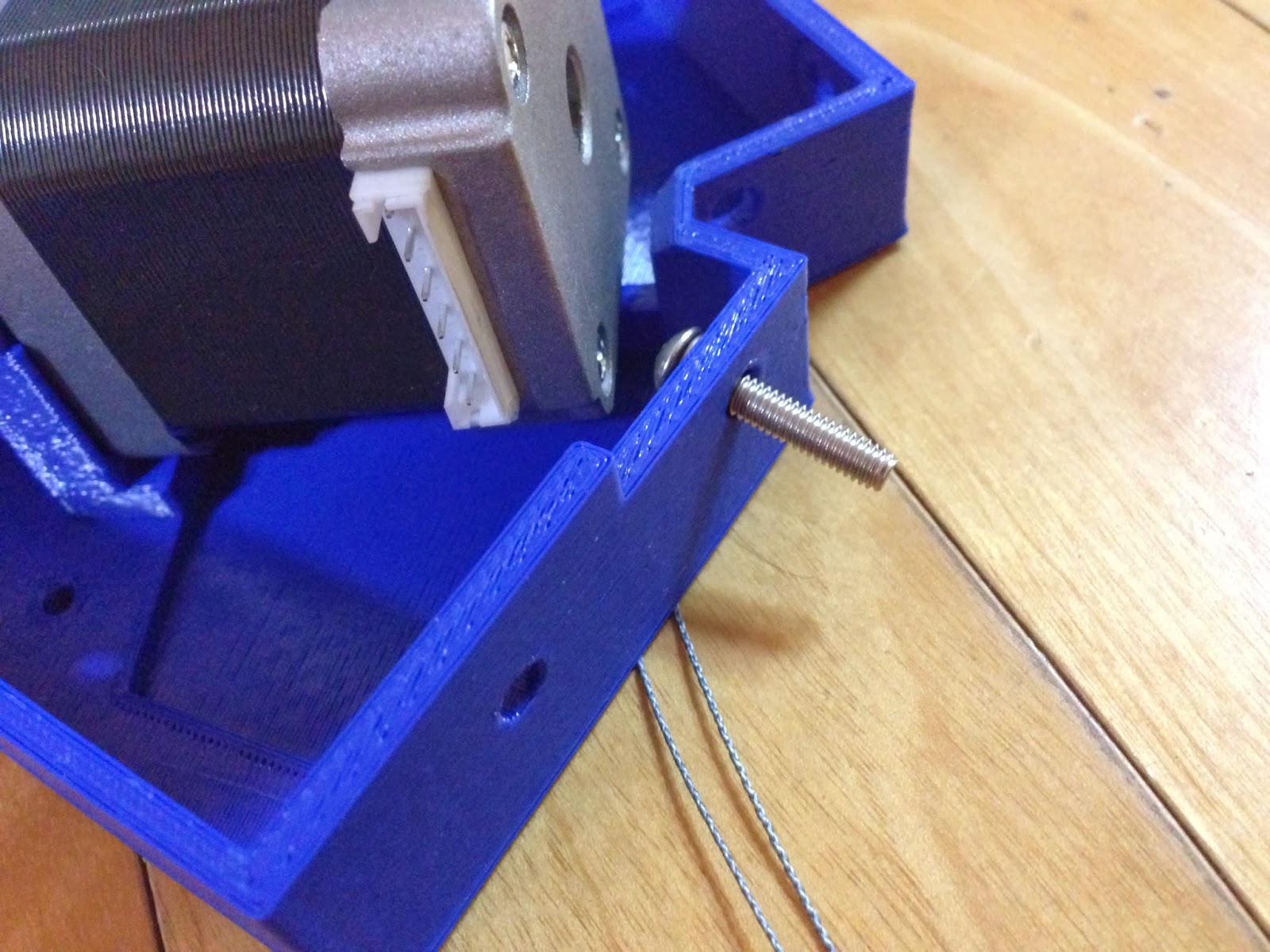
<모터 축 고정용 볼트 삽입>
실을 감기 전에, 모터의 축과 Spool을 고정시켜줄 볼트를 삽입합니다.
저는 진동에 의한 풀림을 방지하기 위해 록타이트 나사잠금제를 조금씩 발라주었습니다.
<모터 고정 전에 볼트 삽입>
바닥판을 연결하는 볼트 중, 모터를 고정시킨 후에는 삽입할 수 없는 위치의 볼트가 있습니다. 이 볼트는 미리 삽입해 줍니다.
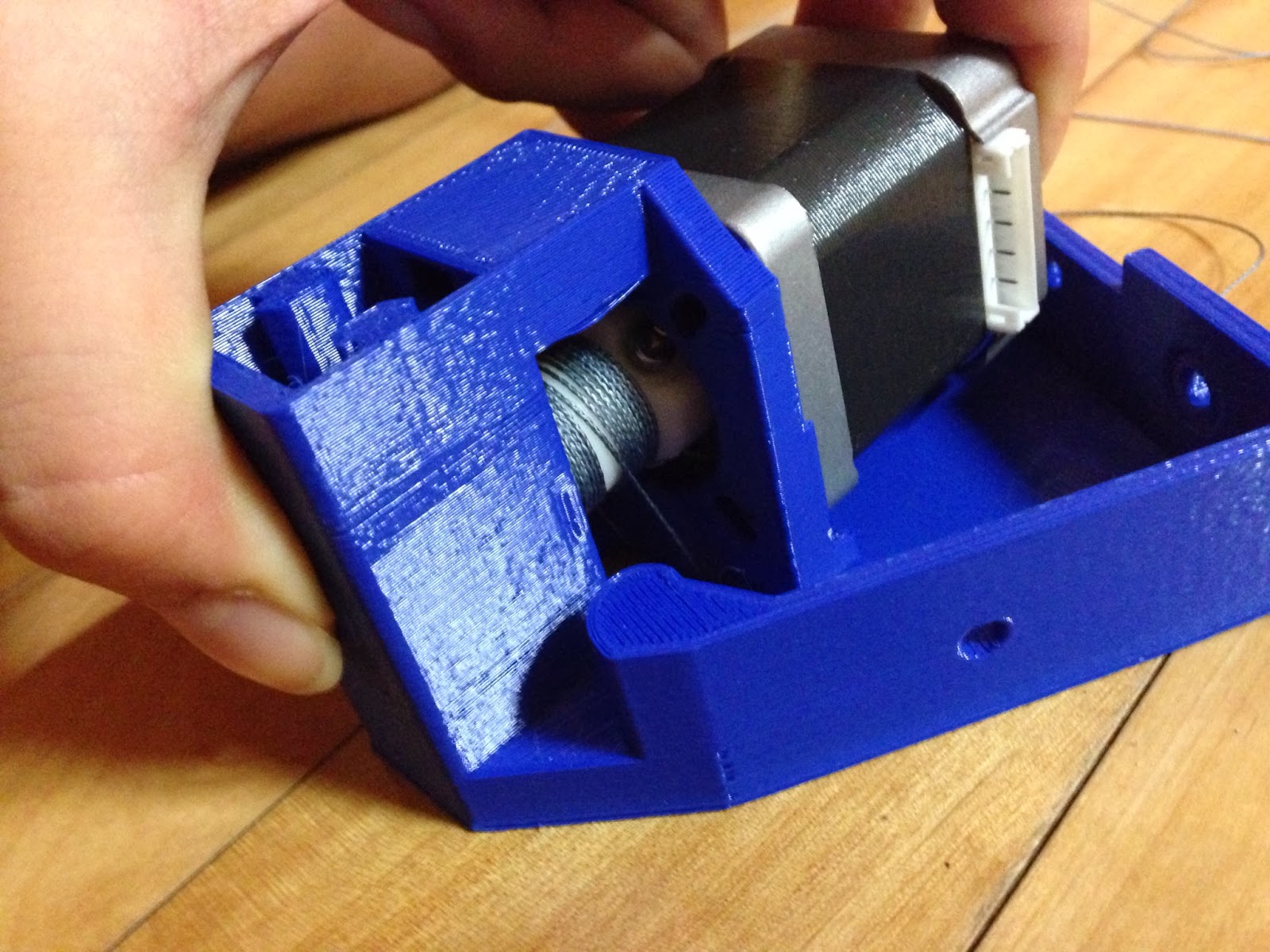
<모터 고정>
다음으로는 모터를 고정시킵니다.
이 때, 실을 팽팽하게 당겨 풀리지 않도록 주의합니다.
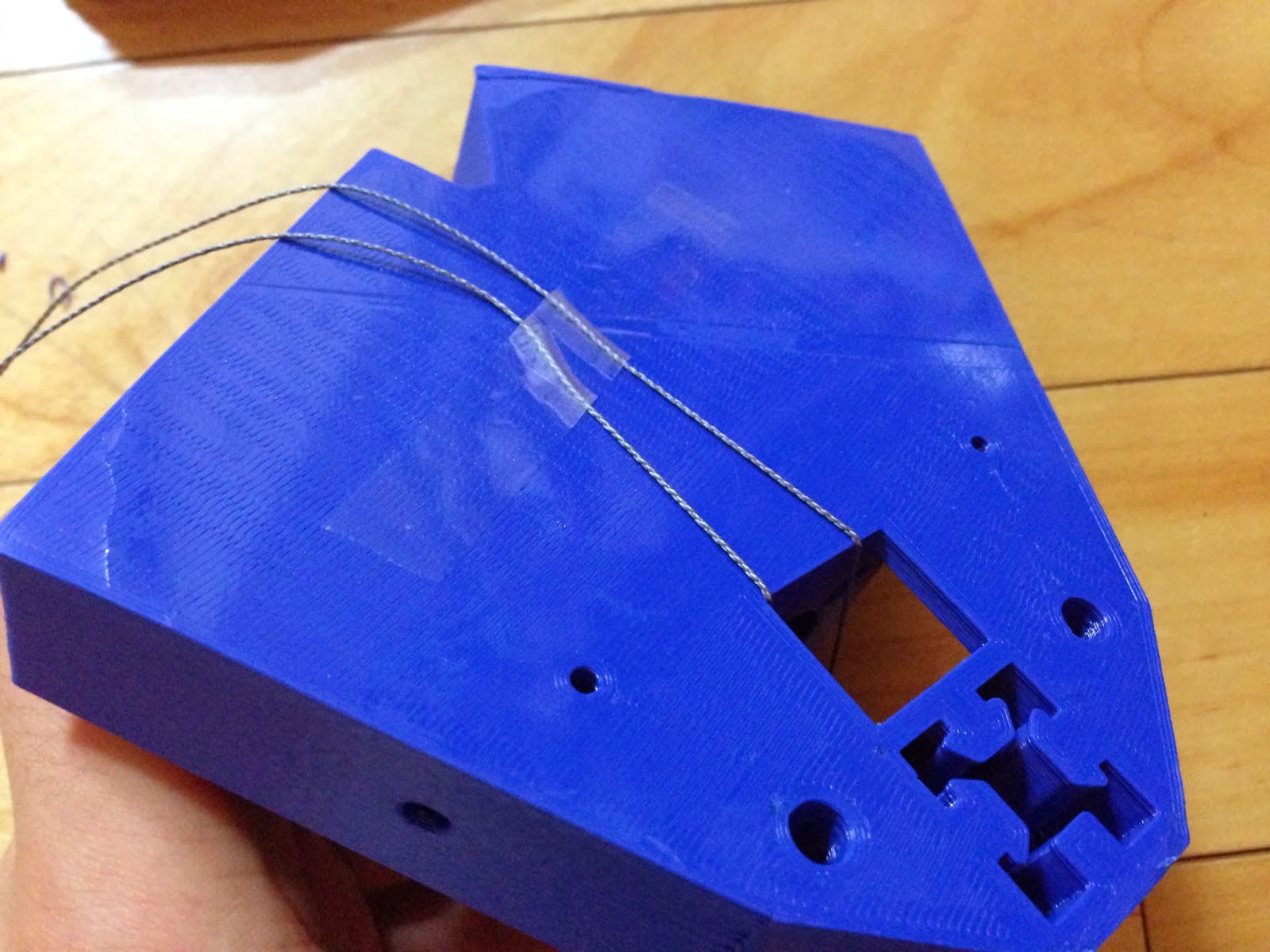
<실을 테이프로 고정>
모터를 고정한 후에는 실이 풀리지 않도록 당겨 테이프로 고정시켜 줍니다.
<아랫판 결합>
이렇게 만들어진 아랫판을 결합합니다.
다음은 윗판 조립입니다.
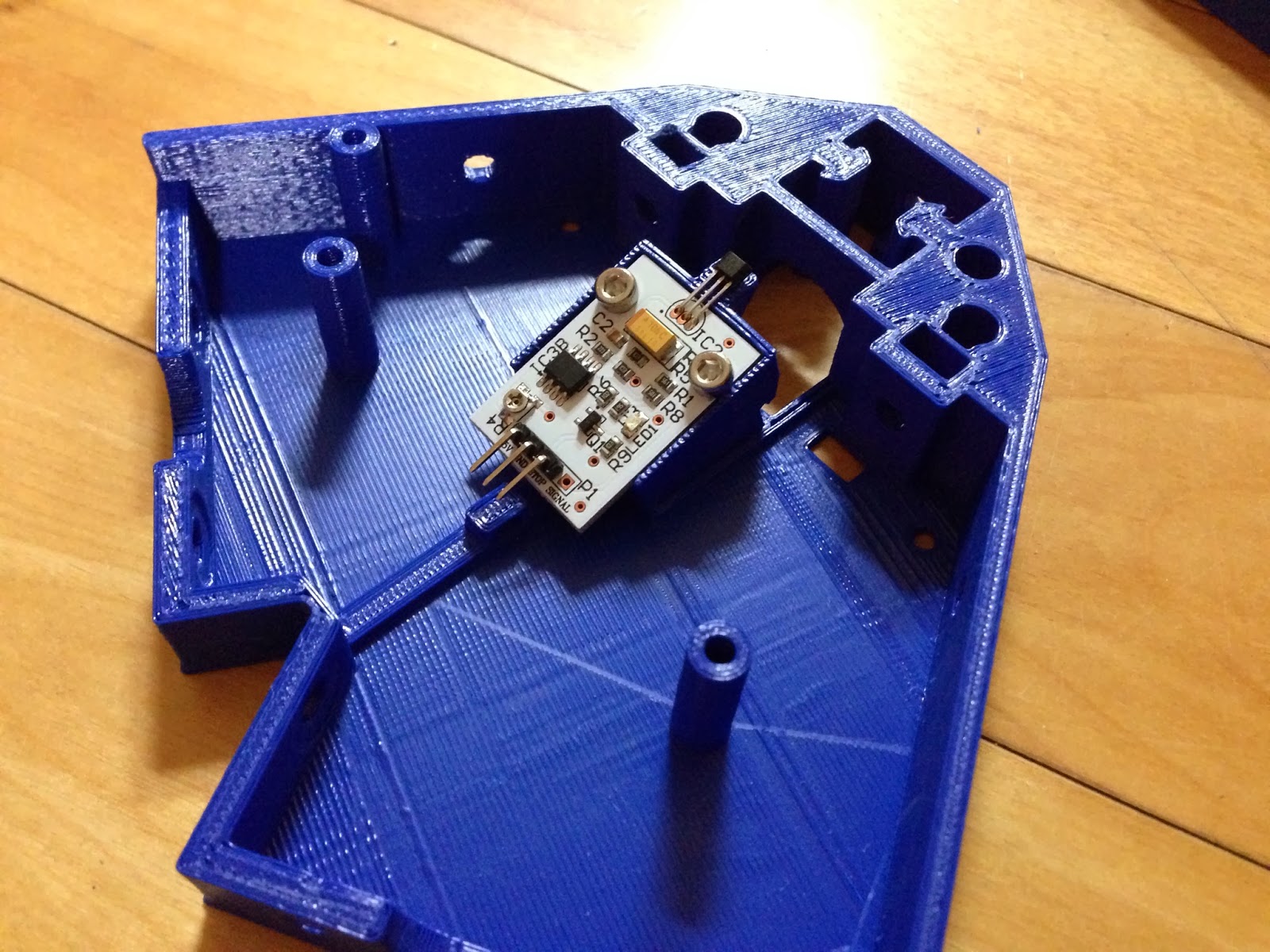
<Hall effect sensor Endstop 장착>
가장 먼저, 윗판 부품에 Hall effect sensor Endstop을 장착해 줍니다.
이 부품은 carriage가 가까이 오는것을 감지해서 영점을 잡아주는 역할을 합니다.
일반적으로 마이크로 스위치를 많이 사용하는데, 3DR은 자석을 감지하는 홀센서를 사용합니다.
이 방식은 반복 사용에도 정밀도가 유지되고, 가변저항을 돌리는 것으로 쉽게 영점을 조절할 수 있다는 장점이 있습니다.
<윗판 결합>
그러고 나서 윗판을 결합해 줍니다.
그 다음에는 프로파일과 연마봉을 이용해서 윗판과 아랫판을 결합시켜야 하는데, 프로파일을 잘못 구입해서 밑판을 부러트렸습니다.
<대참사...>
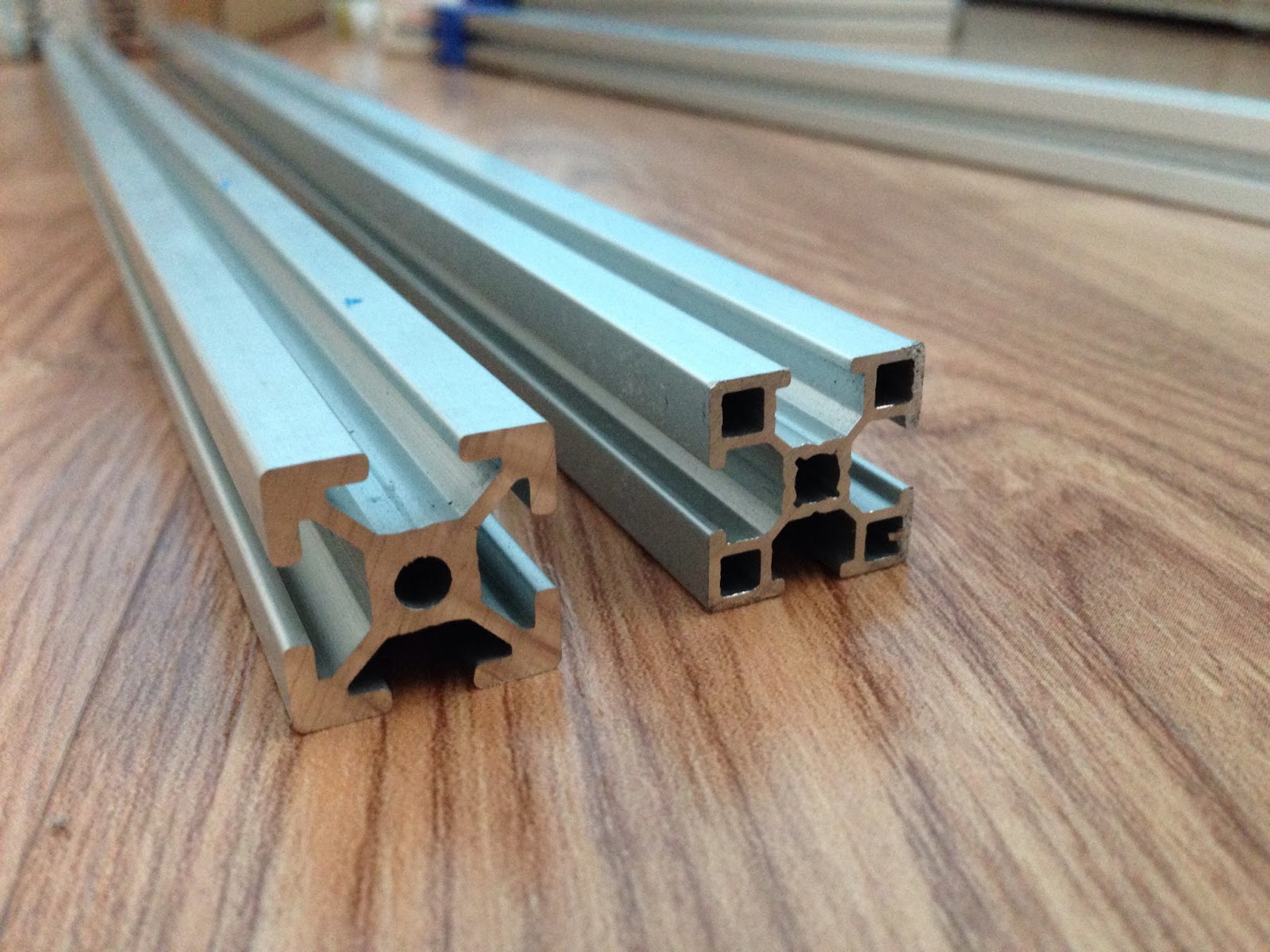
알고보니, 프로파일은 반드시 미스미의 프로파일을 사용해야 합니다.
<좌: 미스미 프로파일, 우: 일반 프로파일>
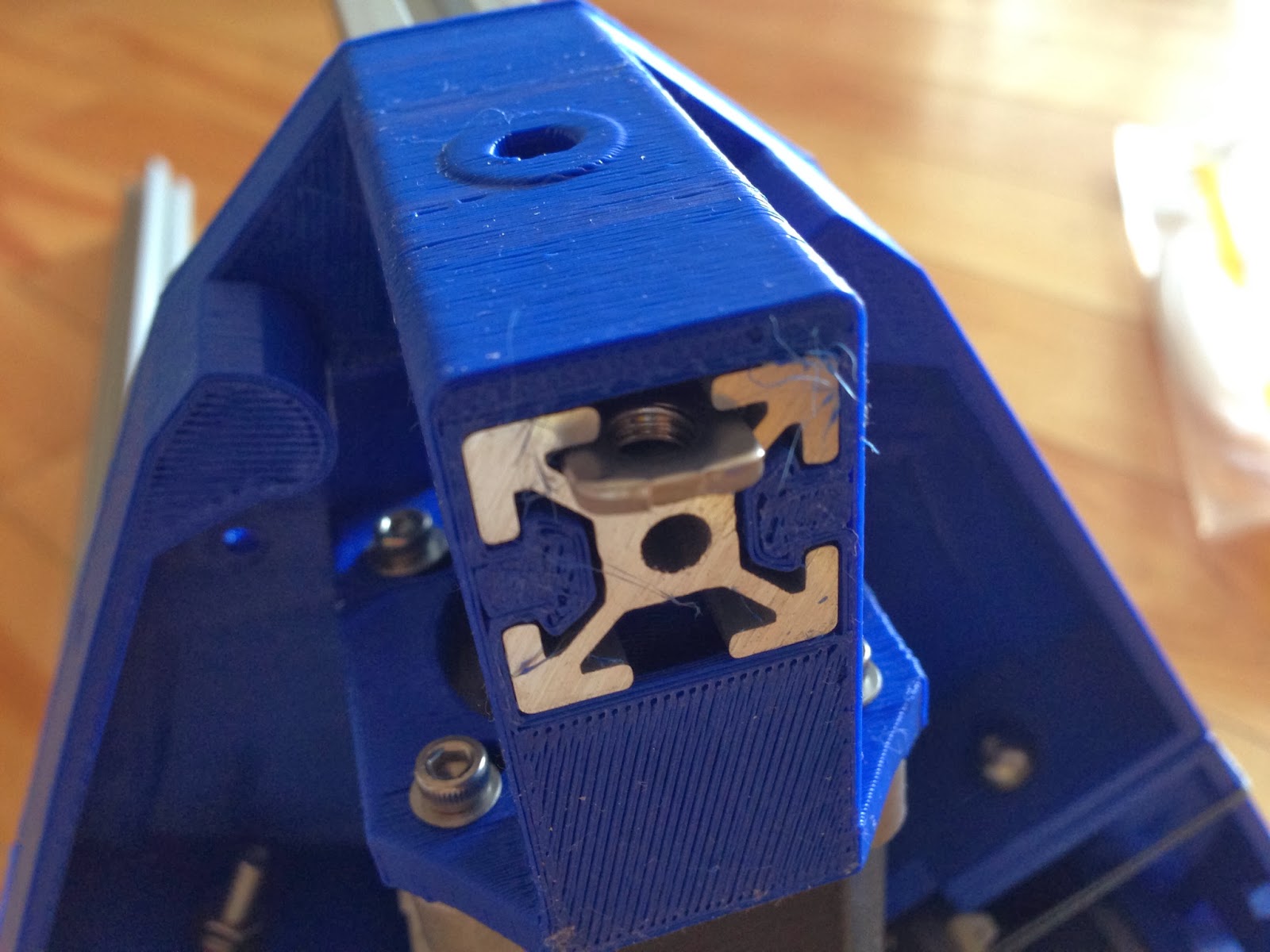
<프로파일이 결합된 모습>
일반 프로파일은 프로파일 결합에 M5 너트를 사용할 수 있도록 네 귀퉁이가 사각형으로 부풀려져 있습니다. 하지만 이 구조는 3DR의 설계에 맞지 않습니다.
미스미 프로파일은 가격이 저렴한 편이니, 미스미에서 주문하세요.
미스미 프로파일은 일반 M5 너트로는 결합시킬 수 없으니, 전용 너트를 사용하셔야 합니다.
<미스미 프로파일 전용 너트>
시행착오를 거쳐, 결국 이 부분의 조립을 진행했습니다.
<프로파일 조립>
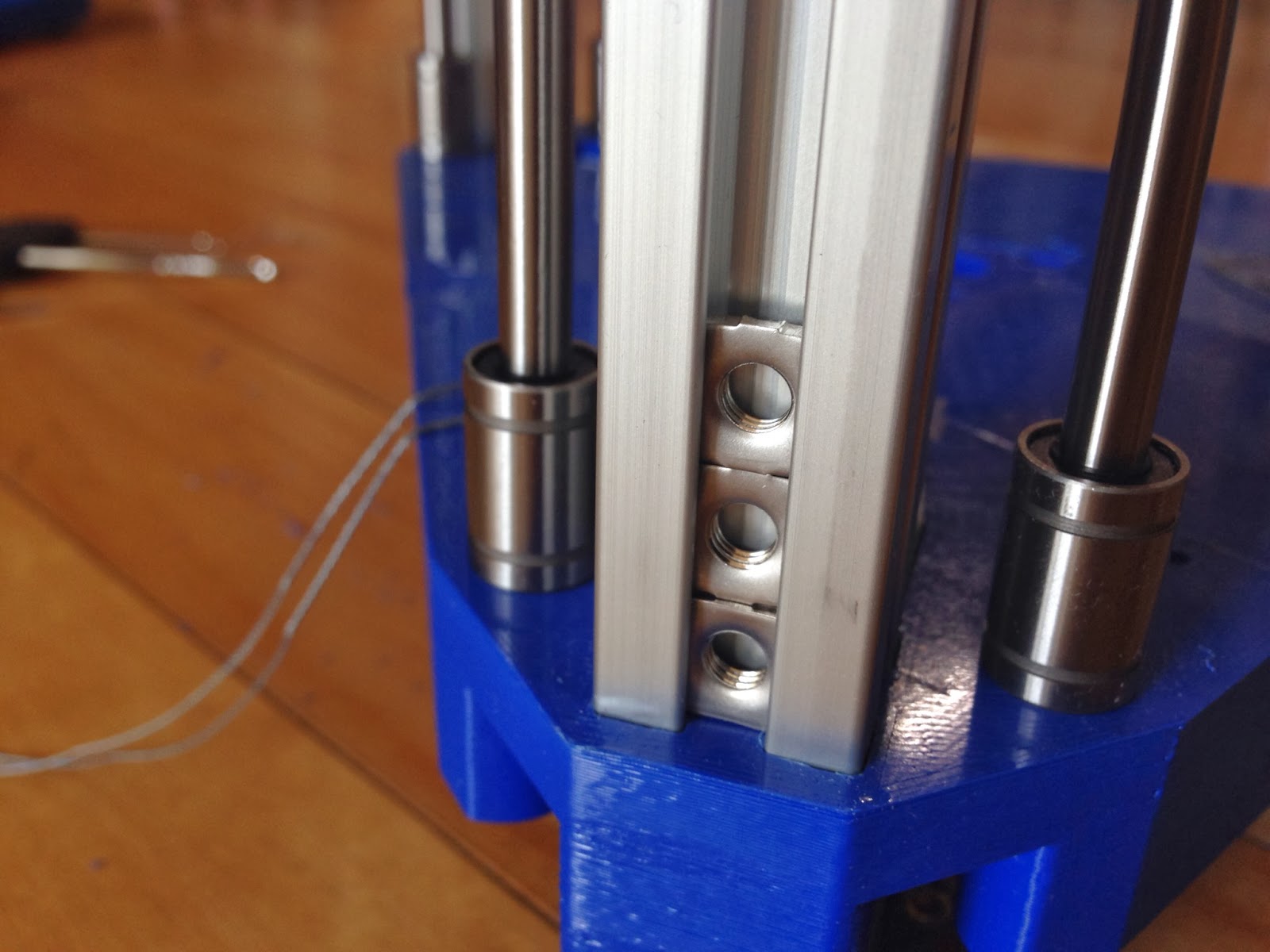
<연마봉 조립>
다음으로는, 여섯개의 구멍에 연마봉을 끼워줍니다.
이때 너무 힘을 주면 아래쪽이 뚫릴 수 있으니 주의하시기 바랍니다.
<LM6UU 삽입>
이렇게 연결한 연마봉에 LM6UU를 한개씩 끼워줍니다.
LM6UU를 끼우기 전에 LM6UU 안쪽 볼에 윤활류를 충분히 적셔주면 수명을 늘리는데 도움이 됩니다.
<프로파일 너트 삽입>
그리고, 프로파일 한개당 프로파일 너트를 3개씩 넣어줍니다.
윗판을 결합한 후에는 프로파일 너트를 넣을 수 없으니 지금 미리 넣어주어야 합니다.
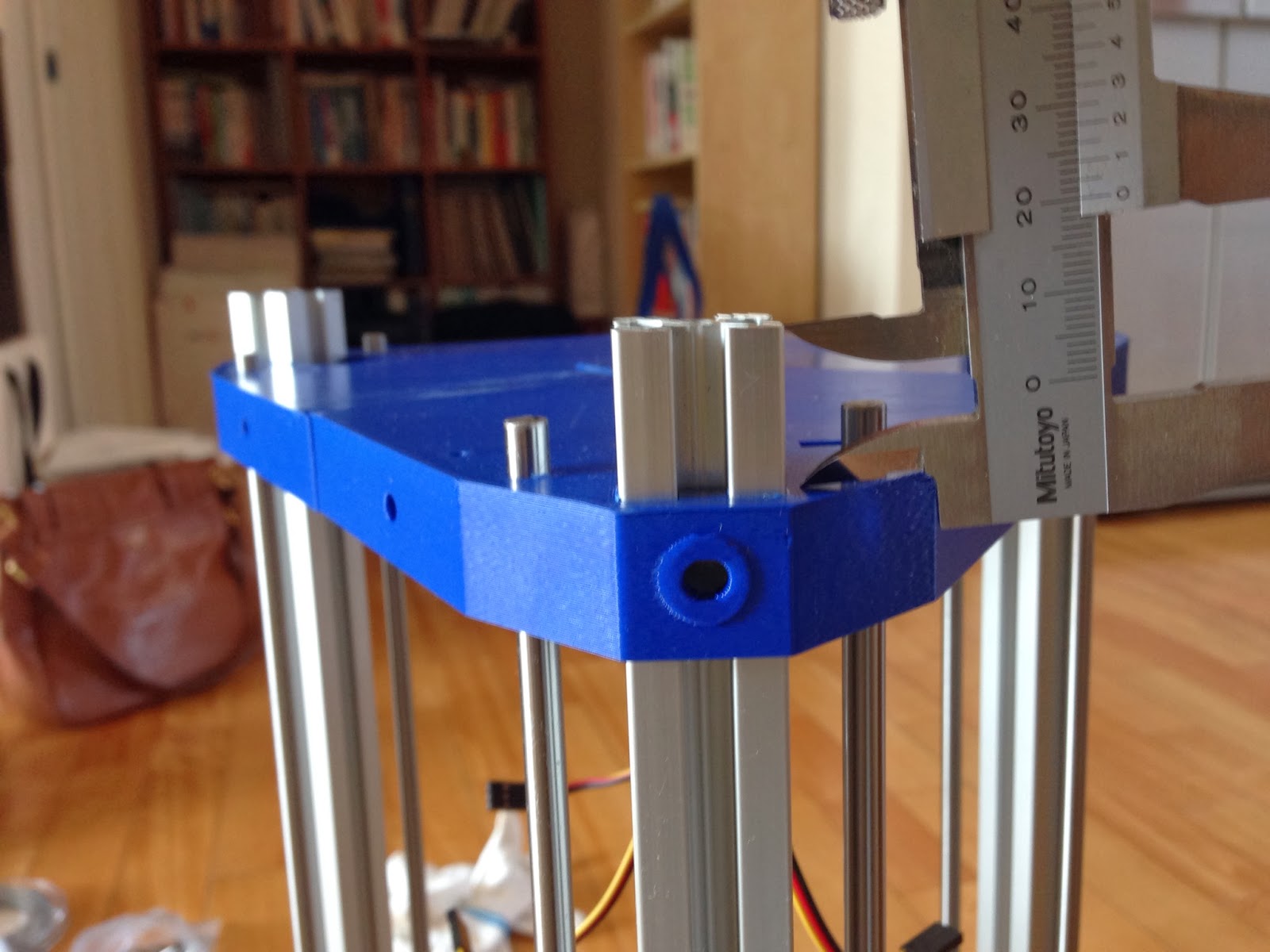
<윗판 결합>
다음으로는, 윗판을 결합해 줍니다.
위로 올라온 프로파일의 높이가 20mm 이하가 되도록 해줍니다.
윗판을 끼울때는 세 방향을 조금씩 돌려가면서 넣어줍니다. 한번에 너무 많이 끼우면 부품이 부러질 수 있고, 잘 안들어갑니다.
<연마봉 고정>
윗판 안쪽의 슬롯에 너트를 넣고, 볼트로 조여 연마봉을 고정시킵니다.
다음은 carriage입니다.
carriage 부품에 자석을 넣어야 하는데, Endstop에서 감지하는 자석의 방향은 정해져 있으므로 이에 주의하셔야 합니다.
<자석 극성 확인>
동봉된 자석을 전원이 인가된 Endstop에 가까이 가져갔을 때 LED에 불이 들어와야 합니다. 이 방향이 위로 가도록 carriage에 삽입해 줍니다.
<자석 삽입>
원래 개발자는 구멍에 자석을 넣는것이 매우 빡빡하다고 했는데, 저는 오히려 헐렁거렸습니다.
휴지+순간접착제 신공으로 고정시켰습니다.
<로드와 carriage 연결>
접시머리 나사와 콘와셔를 이용하여 로드와 carriage를 연결해 줍니다.
<완성된 carriage>
이렇게 carriage가 완성되었습니다.
<LM6UU에 Carriage 연결>
케이블 타이를 이용해 LM6UU와 carriage를 결합시킵니다.
다음은 텐셔너입니다.
<텐셔너 제작>
텐셔너는
M5*20mm 볼트 - 625베어링 2개 - M5 너트 - 와셔 - 프로파일 너트
의 순서로 만들어집니다.
M4 볼트와 624 베어링을 사용해도 됩니다.
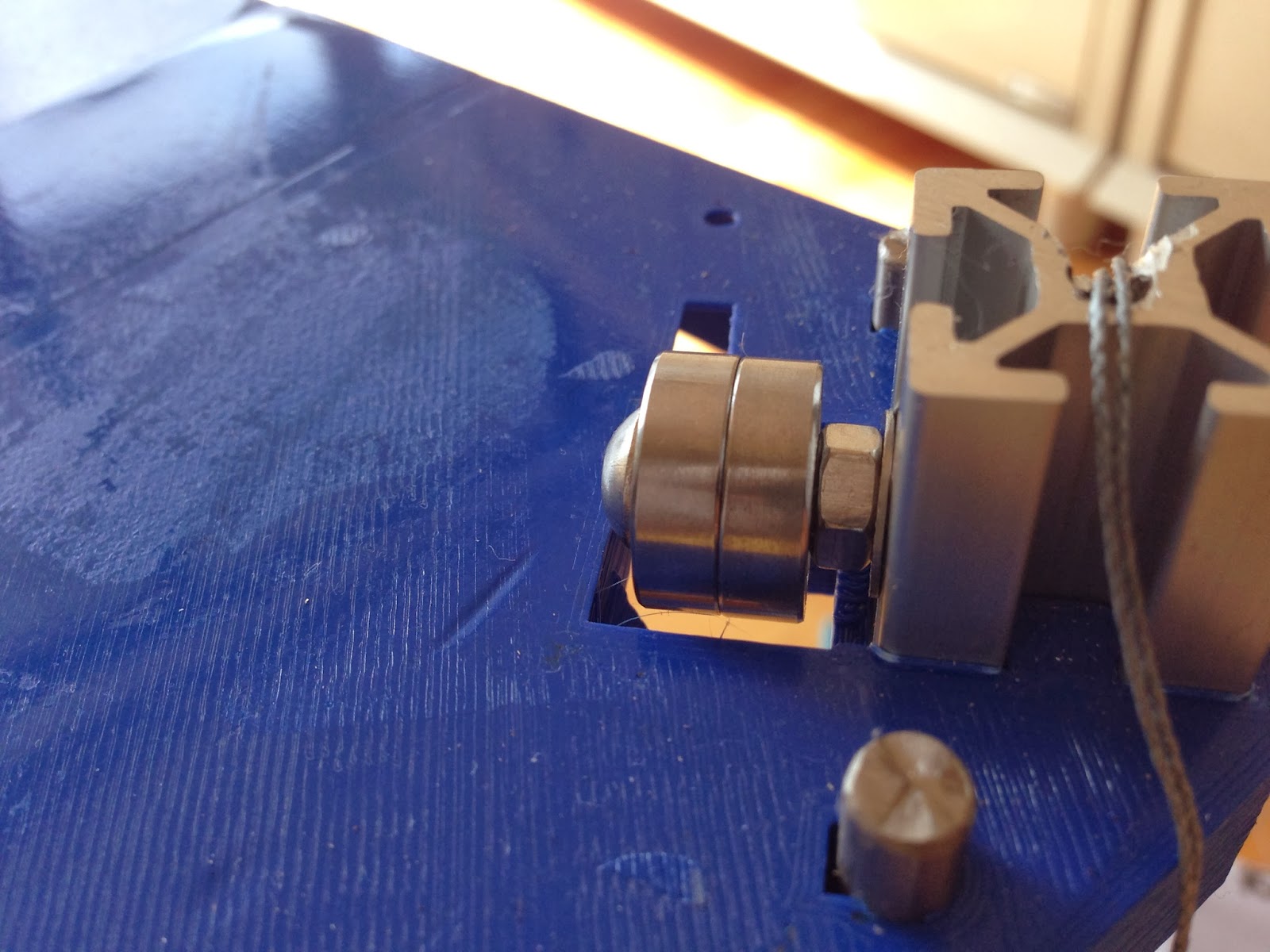
<텐셔너 설치>
만든 텐셔너를 프로파일에 설치합니다.
최대한 아랫쪽으로 내려서 설치해야 나중에 장력을 높이는데 수월합니다.
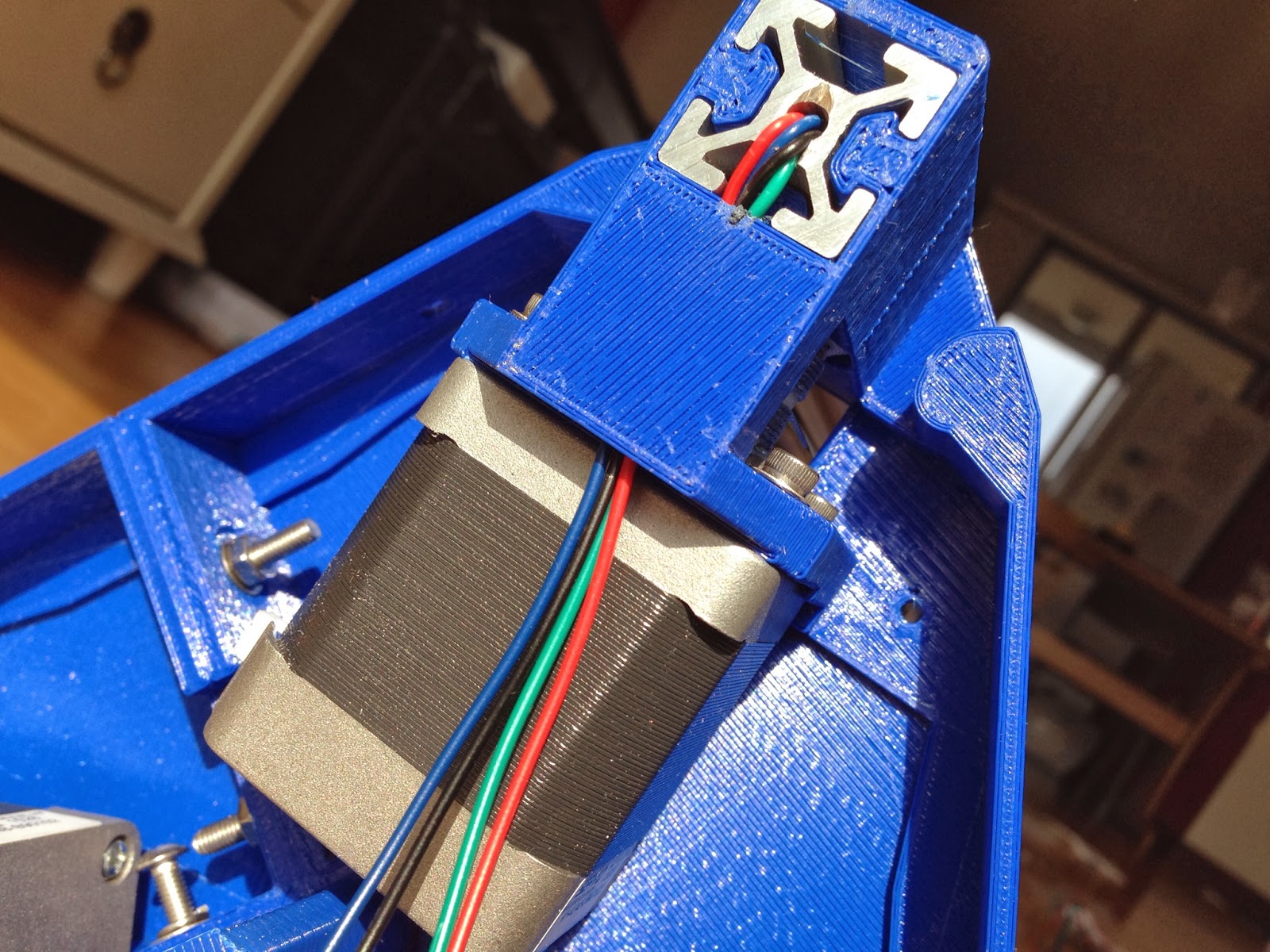
<모터 선 배선>
프로파일에 미리 낸 홈을 통해 모터 선을 프로파일 속으로 배선합니다.
꼭 이렇게 해야 하는것은 아니지만, 이렇게 하면 굉장히 깔끔해집니다.
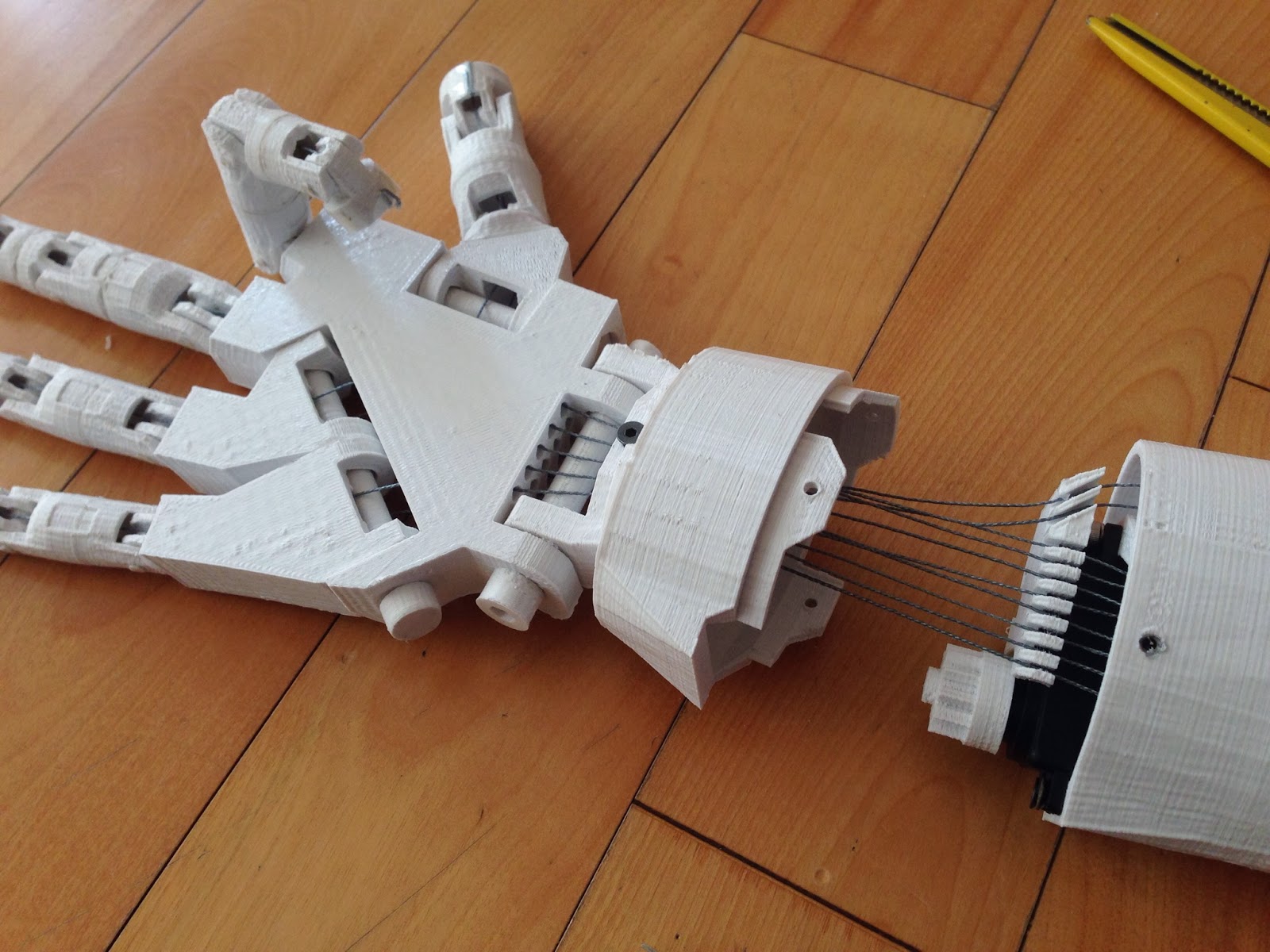
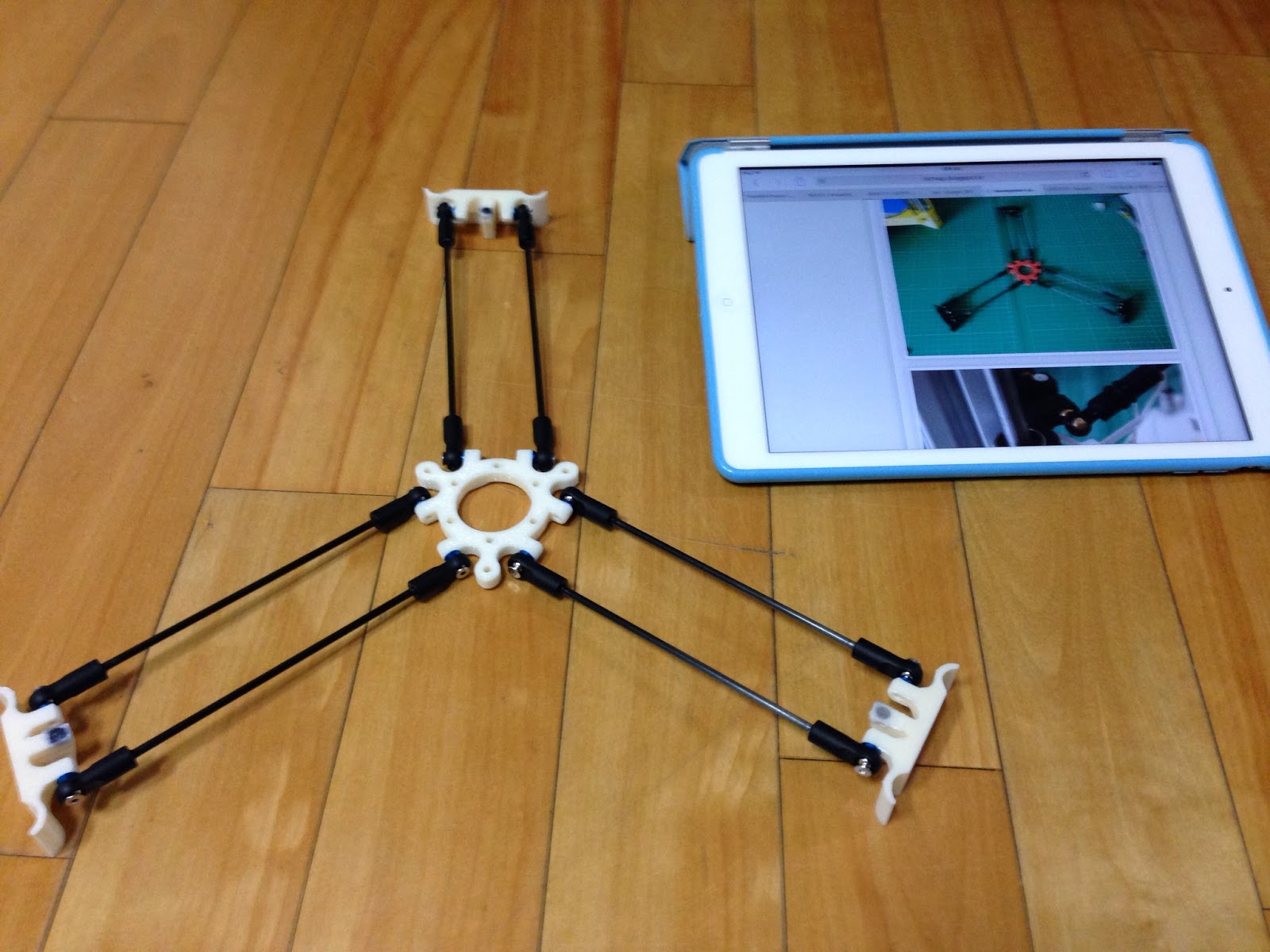
<낚싯줄 연결>
다음은 낚싯줄을 연결하는 과정입니다만, 이 과정이 상당히 복잡하므로
개발자의 블로그를 참고해 주세요.
노즐과 익스트루더, 그리고 전자 부품의 연결은 다음편에 계속하도록 하겠습니다.