

2015年 11月 07日
倒立振子 ステッピングモーター仕様 プログラム |

走行のためにはWiFi経由で信号の伝達を行います。信号の送信にはTouchOSCという市販アプリを使います。Android版(¥450)とiOS版(¥600)がありますので安いほうのAndroid版をタッチパッドにDLLします。使い方はこちらのサイトを参考にさせていただきました。
BROBOTのソフトからTouchOSCというフォルダーのなかのTROBOTver2.2.touchoscというファイルをToucOSC Editorで開きます。編集は簡単ですので使いやすいように変更してタッチパッドに同期させます。
出来上がりはこんなふうになりました。

つぎにタッチパッドでの設定です。右上の●をタッチして設定画面のOSCをタッチしてOSC画面でHOST側のIPアドレス、送受信のPORTアドレスを設定します。これでDONEで終わりです。
ロボットは動くはずです、試運転です。動きましたが前後、左右が逆になっています。結線を変えるのも面倒、プログラムを変更するのも面倒と思案していましたが、TouchEDITORのなかにInvertedというチェック項目があったのを思い出しました、ここにチェックをいれれば正負逆転するはずです、成功です。前後進、左右旋回は正しく操作できます。
さて、本格的に動かしてみますが、ここまできたらついでにオプションで搭載したヘッドライトと距離センサーもプログラムしておきます。ヘッドライトはタッチパッドから信号を受け取れば点滅というふうにしまた。倒立振子ではdelay()が使えないので工夫が必要です。距離センサーは制限距離以内で停止というふうにしました。ただ距離センサーが思い通りには動いてくれません。単体では問題ないのですが、本体のプログラムにいれると妙な値を出力します、ただ数値は変ですが検出はしているようです。原因究明は後日として近づいた時の数値で機体を停止することにしました。
試運転の結果です。快調に走行します。これまで作ってきた機体とは数段違う動きです。
これはもう少し研究してみる必要がありそうです。
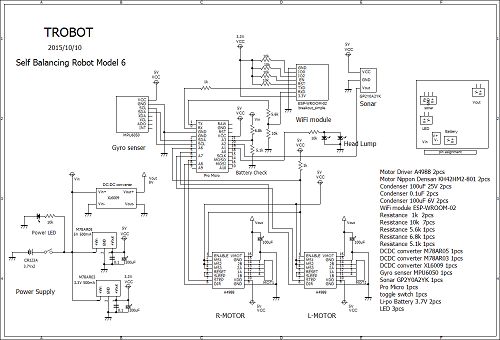
最終の回路図も掲載しておきます。

(2015年11月)
■
[PR]
by kookymaverick
| 2015-11-07 14:18
| 倒立振子
|
Trackback
|
Comments(1)
kookyさん、毎度です。ばんとです。
素晴らしい動きですね。kookyさんのロボットを参考
に作ってみようかと思います。
とりあえずAliexpressに注文してみます。
ところでステッピングモータ、結構大きなものを使用
しているようなのですが、トルクが大きく有利なので
しょうね。
トルクが大きそうなステッピングモータをデジットで
漁ってみます。
素晴らしい動きですね。kookyさんのロボットを参考
に作ってみようかと思います。
とりあえずAliexpressに注文してみます。
ところでステッピングモータ、結構大きなものを使用
しているようなのですが、トルクが大きく有利なので
しょうね。
トルクが大きそうなステッピングモータをデジットで
漁ってみます。