倒立振子はしばらくお休みとして、出来るだ小さなロボットを作ってみたくなってきました。
きっかけは、以前購入して在庫になっているSG90という重さ僅か9gのサーボモータを連続回転しようという記事をネット上でみつけたことです。その記事はこちらです。
http://d.hatena.ne.jp/licheng/20140822/p1
そこそこトルクもありそうなので、タミヤのクローラぐらいは駆動できそうです。
であれば出来るだけ小さなクローラタイプの車体を作ってみようかと思い立ちました。小型化で問題になるのはバッテリーですが、小型のリチウム電池RCR123Aを1個を基板上に載せてみることに、どうせならば距離センサーで障害物検知と構想がまとまり、いつもの様に3DCAD上で構想を描いていきます。
どうにか70㎜四方の手のひらサイズでまとまりそうです。
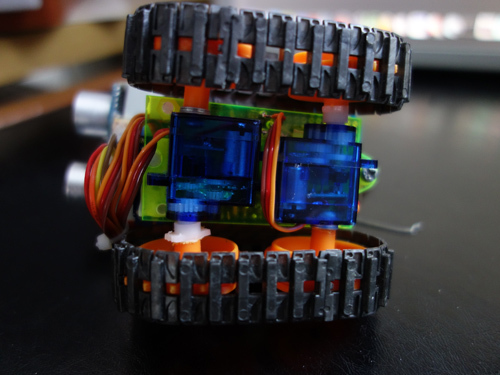
それでは工作にとりかかります。まづはSG90の全回転化の工作です、参考にさせていただいたHPにしたがって進めていきます。1個目は問題なく完成、2個目で問題発生です。ポテンショメータ軸を固定するために流し込んだ瞬間接着剤が変なところに入ってしまったようで抵抗値がゼロになってしまいました。仕方がないので基板上のポテンショメータ接続点に半固定抵抗を半田付けしてみました。手持ちに2kしかなかったのですが、これでも問題なしです。結果的にはこの方が中立点を外部から調整できるので便利です。
クローラ部分はタミヤの「楽しい工作シリーズ・トラック&ホイールセット」を利用します。完成した走行部です。
配線図を掲載しておきます。
3.7Vを秋月電子のAE-XCL101C501BR-GというDCーDCコンバータで5Vに昇圧します。マイコンはAITENDOの「あちゃんでいいの」を使っています。距離センサの首振りサーボに連動させて機体の後方でPOWERLEDを首振りさせるようにしてみました、ちょうど尻尾のようでなかなか可愛いです。
完成した本体です。重量は125gでした。
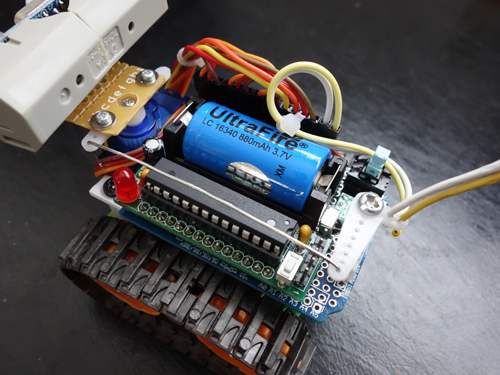
(コントロール基板)
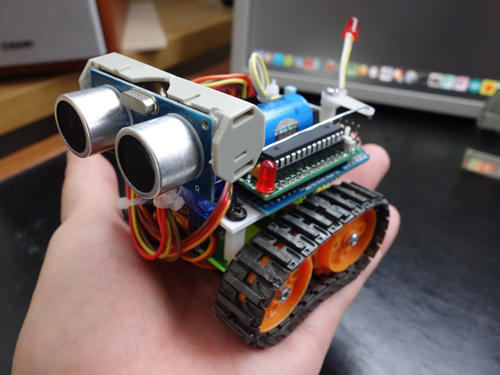
(手のひらサイズでまとまりました)
さて、試運転です。プログラムは以前に制作した同様の機体のものを流用しています。前方は常に監視、空きがなければ停止し左右の空きのあるほうへ旋回、さらに0.1秒ごとに左右を監視、左右が限度距離以下であれば空いているほうに旋回、どちらも空きがなければ反転というふうにしてありますが、まだうまく動いてはいません。一応、監視と退避は出来ているようです。
まだプログラムのブラッシュアップが必要です、赤外線センサーも搭載してあるのでいずれはリモコン操作にも対応してみるつもりです。
(2015年7月)





















