

2015年 11月 30日
倒立振子 7号機 構想 |
6号機ステッピングモーター仕様の出来のよさに味をしめて7号機を製作することにしました。テーマは6号機の小型軽量化です。なにしろ初めて使うステッピングモーターということで6号機は完成することだけを主眼にしたので完成重量625gというどうどうたる機体になってしまいました。DCモーターながら4号機にて手のひらサイズを実現したからには、こちらも軽量小型化したいのです。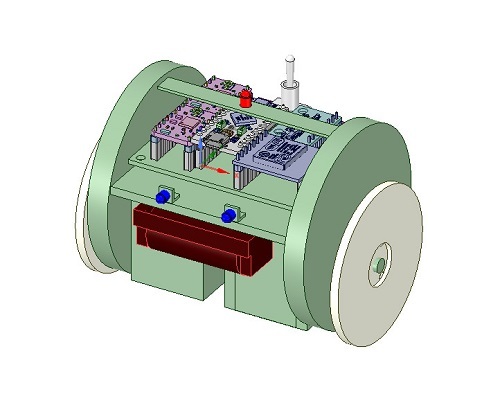
測距センサーを取り付けてみました。このままではなんとも無骨なのでセンサー部も機体にもカバーを考えなければいけませんが、いまは機体の製作が先です。 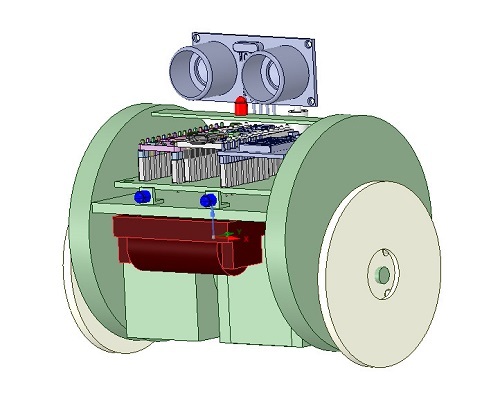
PC基板です。すべての機能を一枚の基板に収めています。各モジュールはソケット取付として交換可能としています。寸法は47×66㎜の予定です。 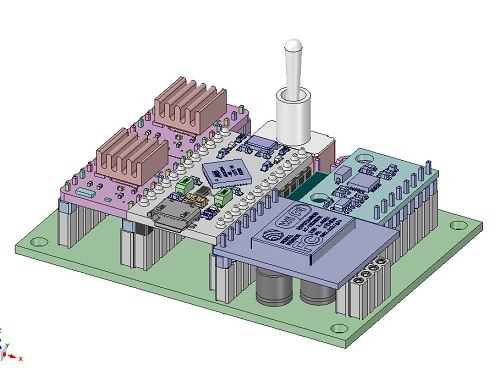
6号機の最重量部品は200gのモーターです。2個で400gと機体のほとんどを占めています。そこで今回は同じ日本電産サーボのなかでも軽量なKH39Fシリーズを使うことにします。重量は160gということなので80gほと軽量化できます。オリジナルマインド社にて一個480円と格安で販売されています。いつも参考にさせていただいていますparadiseさんのサイトにも同じモーターでの作例があり心強いことも一因です。
小型化のために4号機で採用したようにモーター周りに電池を配置することにします。これで背は低く抑えることができます。電源の昇圧回路は不要なことは6号機の製作時に確認してありますので省略します。これで回路基板は一枚で製作することができます。ここまで構想がまとまったので早速3DCADにて構想図を描いてみます。最近は実機製作よりも3DCADであれやこれやと構想を描いているほうが楽しくなってきています。デザイン的には円筒型をイメージしています。幅100、高さ75、奥行75㎜の予定です。小型軽量化が今回の目的ですが、美しい機体をデザインするようにいつも心がけています。見た目に美しい製品は性能も良いが現役時代からの拘りです。



■
[PR]
▲
by kookymaverick
| 2015-11-30 12:44
| 倒立振子
|
Trackback
|
Comments(0)


























