

2015年 03月 30日
Arduino 倒立振子 2号機 |
低重心の1号機はなんとか立ちましたが、安定して立てるまでにはなかなかならず、オーソドックスな背の高い形状にした場合はどうなのかが気になりだしました。
廃材を利用してサクサクと一台組み立ててみました。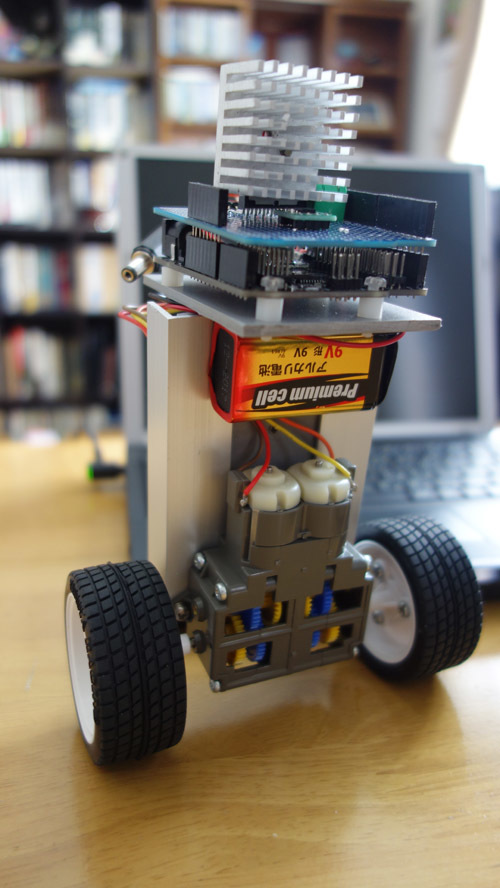
結局、k1=260,k2=220,k3=160,k4=120で立ち上がることができました。k3を大きめにすると同時にk1,2とk3,4のバランスも必要なようです。
廃材を利用してサクサクと一台組み立ててみました。

結局、k1=260,k2=220,k3=160,k4=120で立ち上がることができました。k3を大きめにすると同時にk1,2とk3,4のバランスも必要なようです。
■
[PR]
▲
by kookymaverick
| 2015-03-30 09:54
| Arduino
|
Comments(0)




















