

2016年 10月 21日
倒立振子 モデル10 |
もう一台、倒立振子を作ってしまいました。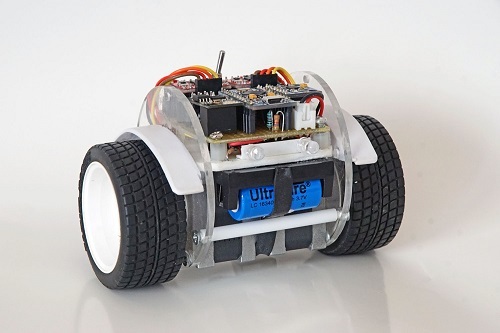

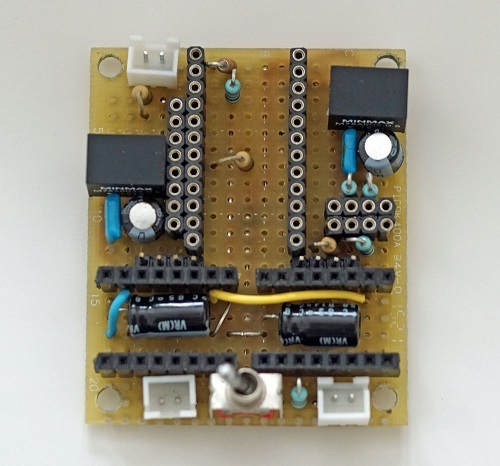
モジュールを取り外した状態の基板です。
機体に取り付け配線した状態です。 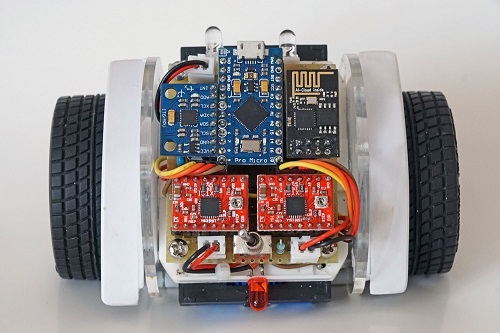

手元にタミヤのゴムタイヤが余っていましたのでこれを倒立振子にはかせてみようと思ったしだいです。
ベースにしたのはモデル7です、ただホイール交換だけでは芸もないので、PC基板を可能な限り小型化してみようということになりました。
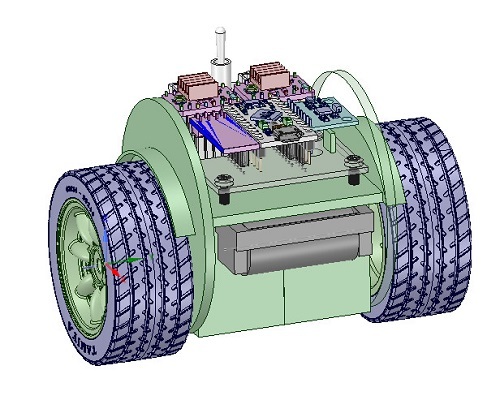
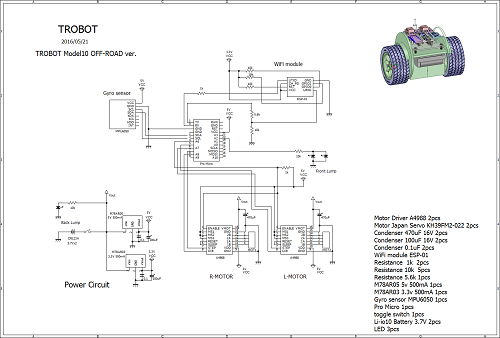
まずはいつも通りの構想図です。

出来上がった基板がこれです。モジュールでほぼいっぱいになっています。



回路図です。
5V 電源はマイコンで作れるので本来は不要です。今回は5Vレギュレータが余っていたので載せてみました。

■
[PR]
▲
by kookymaverick
| 2016-10-21 09:04
| ロボット
|
Trackback
|
Comments(0)









