

2015年 06月 07日
倒立振子 3号機 ほぼ完成 |
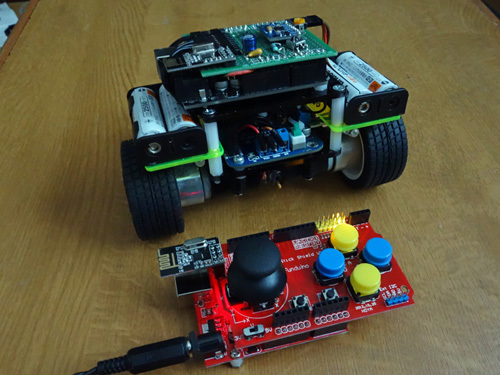
6月5日掲載の記事にて紹介したジョイスティックとnRF24L01なる無線モジュールを3号機に搭載し、プログラムを組みなおして運転してみました。

「角度オフセットの調整を頻繁にするので、ポテンショを追加して機体側で出来るように改造」
「エンコーダーの信号は配線(右上のコネクタ)はしてあるが今のところは未使用、使う必要もないようである」

プログラムはinstaBots社のものを参考にしながら、同社ではMirfにて制御しているが、より高機能なRF24を使っています。参考になったのは前後進の個所ですが、同社の設定ではこの3号機ではあまりにも速度変更幅が大きいので20分の1程度に縮小するぐらいがちょうど良いようです。
当初はジョイスティックシールドにある7個のスイッチを活用してみようかとも思いましたが、結局使いみちもなく今回はただの飾りです。
nRF24L1ですが、やはり電源周りが不安定でたまに制御不能に陥ります。パスコン追加してみましたが効果なし。多分、単三4本の合計4.8Vですべてをまかなうのはもともと無理があるようです。
ともかく、試運転です。これまでの赤外線リモコンでは味わえないようなスムースな運転が面白いです。
(2015年6月)
■
[PR]
▲
by kookymaverick
| 2015-06-07 15:32
| 倒立振子
|
Trackback
|
Comments(0)