

2015年 10月 10日
倒立振子 ステッピングモーター版 |
DCモーターでの倒立振子をこれまで5種類作ってきましたが、そろそろ違うタイプを経験してみたいと思い、ステッピングモーター仕様に挑戦してみます。5号機が中途半端になっていますが、こちらは中断ということにします。 写真の左側にステッピングモーター用ドライバー2枚、隣がProMicro、中央上にWiFiモジュール、その下にMPU6050、右端にDCDCコンバータ(昇圧)、その下に電池という構成のようです。
ステッピングモーターは減速機付きDCモーターに較べてバックラッシュの影響がなく、より安定した機体を製作できると言われています。ネット上を検索すると色々ありますがjjrobots社のBROBOTという機体があります。(http://jjrobots.com/b-robot/) なかなかダイナミックな動きをする機体で以前から気になっていました。調べてみると回路図、スケッチさらには3Dの製作図面までが公開されています。
ステッピングモーター以外では走行を制御するWiFiが未知の世界です。マイコンはArduino Leonardoが使われていますがこのボードはこれまで使ってきたATmega386系ではなくATmega32u4というチップが使われていてこれも未経験です。どれも好奇心をくすぐられるアイテムです。
ただLeonardoでは小型化が難しそうです、小型化はこだわっていきたいキーワードです。jjrobots社のフォーラムを見てみるとLeonardoと同じATmega32u4が使われているProMIcroという見慣れないボードを使った記事がありました。(http://jjrobots.com/forum/thread-738.html)なかなかコンパクトに一枚基板で収まっています。どうせ作るならば未経験のこのProMicroを使ってみたいと思っています。掲載写真を転載させていただきます。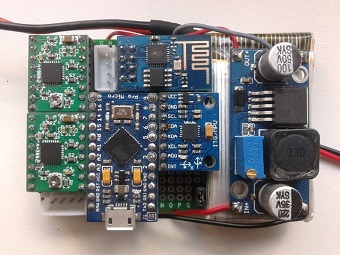

ジャイロセンサーはこれまでも使ってきたMPU6060をBROBOTでも、この写真の機体でも使っているようです。
だいたいの構想がまとまってきましたが、まずはステッピングモーターを駆動する回路から順に試していきたいと思います、次回以降はしばらくは要素別に試作をしていく過程を記録していきます。
順番としては以下のように考えています。
①ステッピングモーター駆動回路
②WiFiモジュールでの通信回路
③ProMicroボードの使い方
(2015年10月)
■
[PR]
▲
by kookymaverick
| 2015-10-10 17:39
| 倒立振子
|
Trackback(1)
|
Comments(0)