Polarshields have always had a space for an external power input. This is so that you can have a high voltage supply to drive the motors, while letting your arduino, and all the logic chips run on a standard 5v, or USB supply.
I got this idea of running two power supplies from the Adafruit motorshield. In their case, the reason was that when the motors started sucking down the power, the voltage supplied to the arduino would drop below 5v for long enough to cause a reset.
I’ve never had that exact problem, but I don’t like running an arduino on a high voltage, when there’s also a high current (like when running motors). The voltage regulators get hot, and while they are within tolerances, it’s not right, and always makes me worry when I put my fingers on them.
The machines I sell are protected by the case, and I was overjoyed when I got a new batch of Freaduino Mega2560s through to use in them, because they are the only arduino compatible boards I have seen to use a high-current, switching voltage regulator rather than the hot’n’cheap linear regs used everywhere else (including the genuine Arduino). These little chips are efficient and stay cool under lots of current.
However, when you buy a Polarshield on it’s own, or in a vitamin kit, you can plug it into any old board. Because they are exposed, it is so much more obvious that something is getting hot. Again, it isn’t dangerous with the motors I use in the vitamin kits, and at low voltages, but if you want to use bigger motors or run at higher voltages, it will not do. The heat makes it clear that there is no headroom.
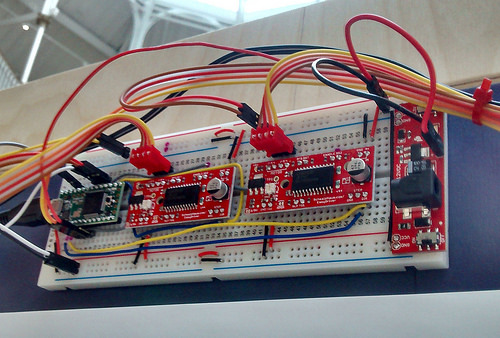
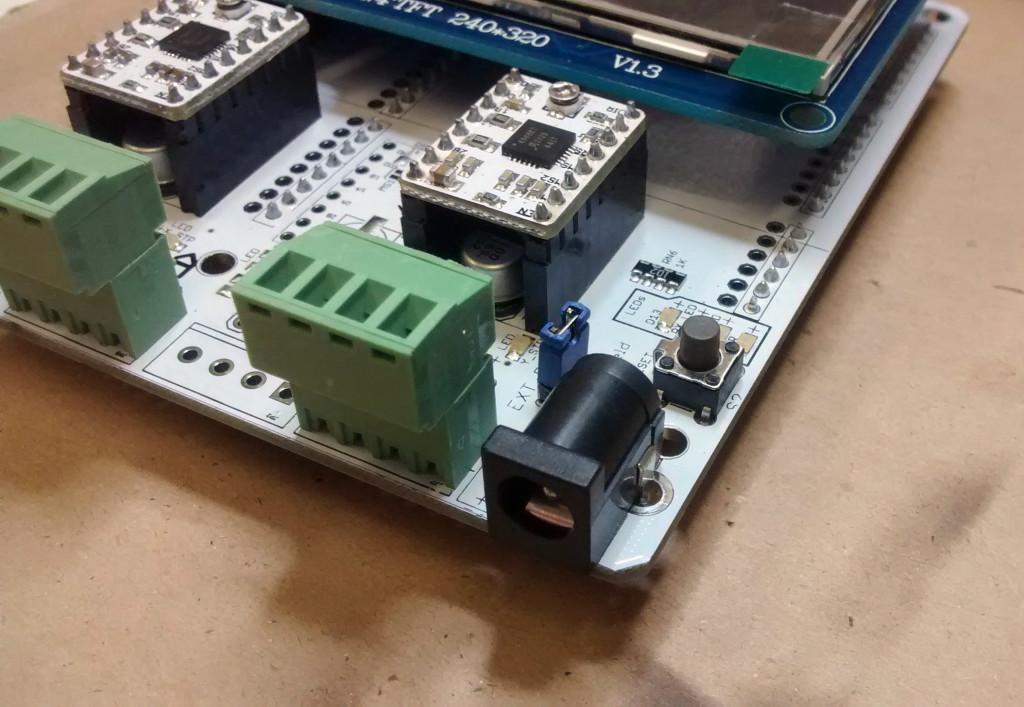
So the solution is to separate the two power circuits by removing the small blue jumper on the polarshield (just beside the power jack), and plugging your motor power supply into the polarshield power jack. The arduino should have it’s own power supply.
Historically, I’ve not soldered the external power jack in, but I have a bag of them and if anybody wants one, I’ll post one over. From now, all polarshields will include this jack, soldered in – unless you drop me a line to say otherwise.