So you wait months for an update and then three come along at once:
Controller updated to v1.42
Main new feature is live drawing from webcam. This is pretty cool actually, almost better than I expected. There is a new tab in the controller, labelled CAMERA, and by default, it’ll show a vectorised version of your webcam’s live feed. There are a couple of settings that simplify the raw video in order to make for faster drawings.
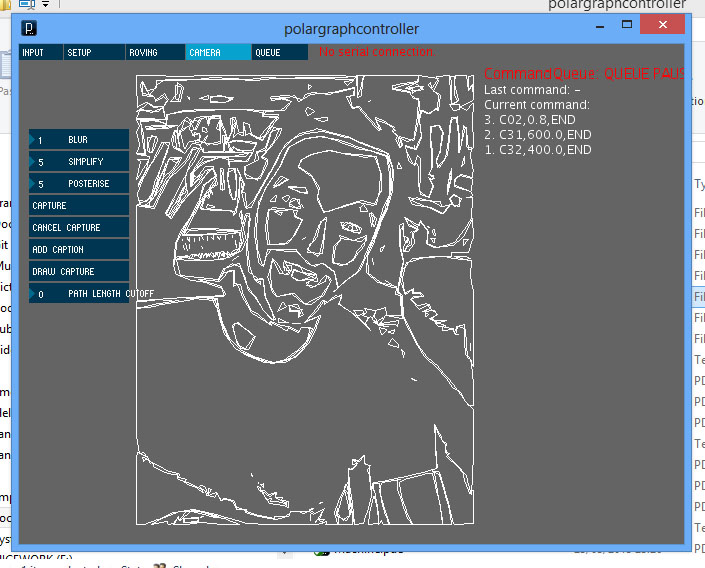
It works by grayscaling, then posterising each frame, then performing a vector trace on each layer of colour.
The simplify control works to remove complexity from the resulting vectors, and creates some amazing abstracted forms at higher levels. Posterise controls how many different layers of colour the image is reduced to, and blur reduces the actual detail.
Hit capture to snap a frame, and get to see (to some extent) the drawing sequence too – darker lines are drawn first. Cancel capture discards the snap and returns to the live feed. Add caption doesn’t work yet! Oops! Draw capture confirms the snap and converts it to commands, and packs them into the command queue. It also saves the image as a SVG somewhere too, in case you need to repeat it.
The drawing is scaled to fit into the picture frame. You know, the picture frame. Everyone uses that, right?
Path length cutoff throws away paths below a certain number of points. This was intended as a way of trying to filter out rubbish single point, or single line paths, but actually simplify works better. The problem with the cutoff is that it counts points in the path rather than actual path length, so you could have a path that forms one whole edge of the snap, but it’d get thrown away because it only had two points in it. Doesn’t make much sense.
Good fun, and good results, I took and gave away portraits all day at the Mini Maker Faire here in Edinburgh week before last, people seemed to like it.
On windows it can be a bit of a cow to get running, it requires the infernal Quicktime, and WinVDIG.
…
The Firmware updated v1.61 for Arduino MEGA based systems (aka Polarshield / PolargraphSD).
So, Accelstepper, the wonderful library that I use to control the stepper movements in Polargraph got a couple of fixes, unfortunately fixing bugs it looks like I was relying on! So at least one person encountered issues using the new versions, and the main part of this update is to fix that. Vector drawing works again, three cheers.
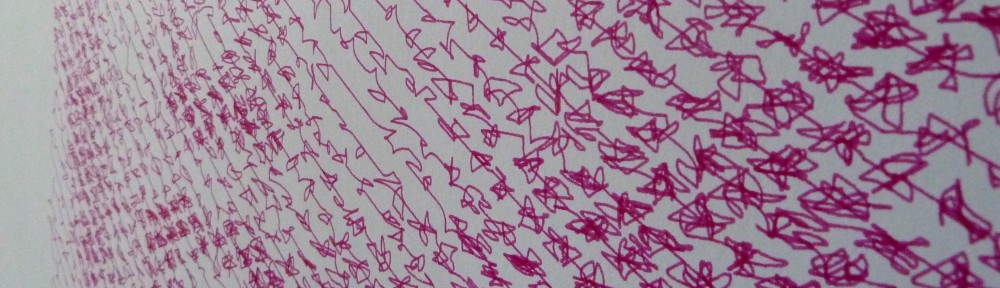
It was a bit of a weird problem (that I went into briefly on the forum), but while I was there I “fixed” a few other things, the main one being the spiral pixel drawing style (aka circular pixel)! It is very working, very quick, and very handsome indeed.
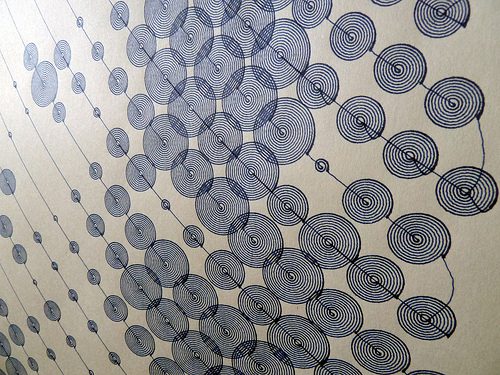
It’s the first “polargraph” style new feature for a long time, and is now quick enough to actually experiment with. Gorgeous.
The code no longer fits on an Arduino Duemilanove, and I think probably not on an Uno either, so I have not included any updates for polargraph_server_a1.
Pen lift height
The servo positions were hard-coded into the firmware previously, but not all servos are created equally, and what was logically a 90 degree move often only turned out to be a 45 degree move (or less!). I have made the servo up and down positions settable and saveable. There is a test lift range button on the setup tab of the controller, along with two number spinners to set up and down position. The test lift range will wiggle to both extremes a couple of times. Once you are happy with the range, press save lift range to load it to the non-volatile EEPROM on the machine. Remember to test it with pen lift and pen drop on the input tab to make sure you’ve got them the right way around. There might be some foibles around that.
Finally, re-upload your machine spec
Maybe you always do this anyway after loading new firmware, but the EEPROM addresses of the various values that get saved there has changed, so they’ll be all over the place. So you need to upload machine spec after updating the firmware.
Speedy chat!
The serial comms handling on the arduino end is now significantly quicker. Very good!
Oddness on the mega line
The version of firmware for the Arduino MEGA using the adafruit shield (polargraph_server_mega) is almost identical to the polarshield variety, but I was getting some really weird results when doing vector drawings on my little machine here last night. It was badly dropping or gaining steps. It works fine on the polarshield machine, but on this one, with a adafruit motorshield, no dice. I think it must be down to the speed that I was driving it at (too high), but I’d be interested to hear if anyone has success with it, or otherwise. Drop me a line please. Thanks!
Github
All the cool kids are using github now, so I am too. The main code packages (polargraph_server_* and polargraphcontroller) are there at https://github.com/euphy. For the time being, the google code project will continue to be the official hub of the project though, but that might change.
Get the bundle at https://code.google.com/p/polargraph/downloads/list




