

2015年 08月 13日
ミニサイズの倒立振子 |
前作ではミニサイズのクローラロボットを完成しましたが、今度は出来得る限り小型の倒立振子を作ってみようと思います。ネット上でミニサイズの倒立振子を探してみましたが、手のひらサイズのものはなかなか見つかりません。ということは、もし完成すればそれなりの満足度が得られるということです。意欲がでてきました。
さて、手のひらサイズというからには横幅80㎜から大きくても100㎜以内には収めたいです。小型にしてもずっしりと重いというのでは興ざめですから重量は150g以内というところが目標です。
問題はモーター選びです。そこそこトルクがありそうで小型のものでは前作で使った9gサーボを連続回転にする方法でも使えそうですが、こちらは回転速度の微妙な調整がかなり難しく候補からは外れます。ステッピングモーターには小型で全長の短いものがありそうなのですが、胴回りが大きいので小型化には向きません。結局、減速機付きのDCモーターの中から選定してみることに。ネットを検索するとありました、AliExpressに6V駆動で200rpmという小型のものを見つけました。回転数もトルクもなんとか使えそうです。シャフトを除いた全長24㎜ですから車輪をつけても片側50㎜以内で収まりそうです。早速2個を注文、2個で送料込で8ドル弱でした。
つぎに、車輪選びです。こちらはタミヤのスリムタイヤセットを選択しました。車輪径が36㎜と55㎜の二種類あります。シャフト径は六角3㎜に対応しているので、モータのシャフト径が3㎜ですので追加工すれば接続出来そうです。
センター出しが肝心ですので慎重に工作します。J3という部品の六角穴側からM3タップをねじ込んでいきます、六角穴がガイドになってセンターが出し易くなります。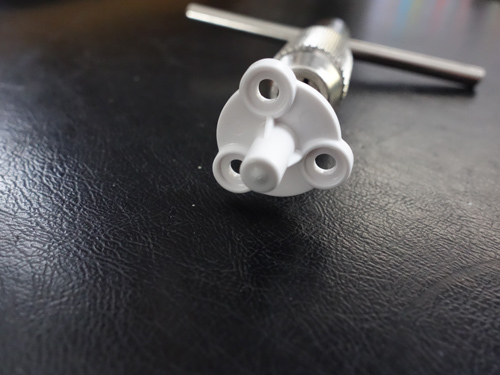

駆動系に目途がついたので三次元CADで構想図を作成していきます。機体幅100㎜でなんとか収まりそうです。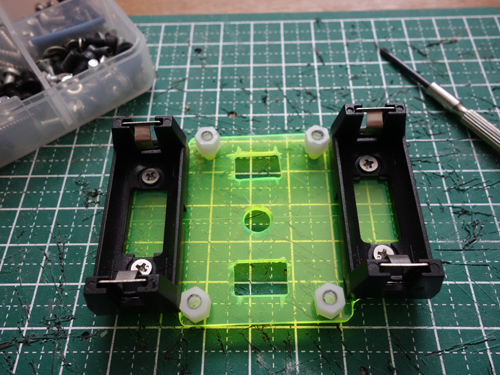
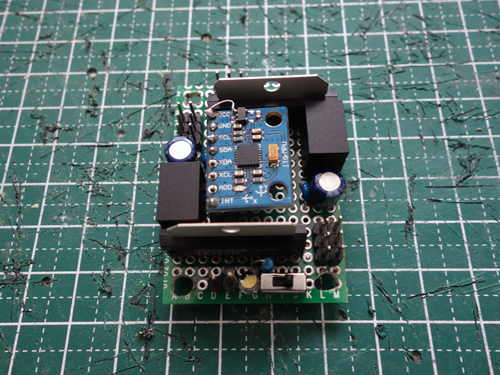
全体の回路図です。注意点はUSBとの接続ポートのRESETとマイコンの1番ポートの間に0.1μのコンデンサを追加しないとプログラムを読み込みできなかった。理由はよく解りません。今回の回路特有の問題かもしれません。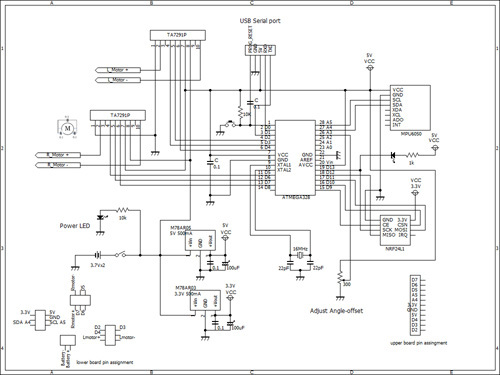
以前に製作した3号機との比較です。ずいぶん小型軽量化できました。基本的な機能はまったく同じです。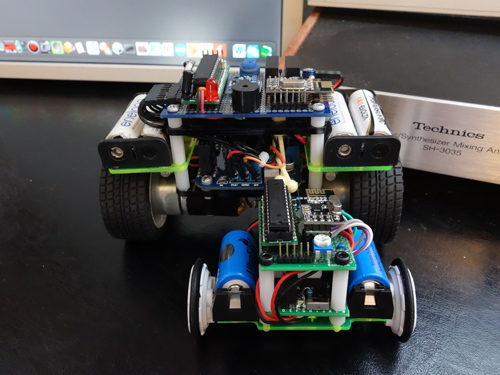
プログラムは3号機のものを流用していますが、各定数は機体に合わせて調整が必要です。まだだチューニングが必要ですが、なんとか倒立姿勢は保てるようになってきました。その模様を動画にしてみました。
さて、手のひらサイズというからには横幅80㎜から大きくても100㎜以内には収めたいです。小型にしてもずっしりと重いというのでは興ざめですから重量は150g以内というところが目標です。
問題はモーター選びです。そこそこトルクがありそうで小型のものでは前作で使った9gサーボを連続回転にする方法でも使えそうですが、こちらは回転速度の微妙な調整がかなり難しく候補からは外れます。ステッピングモーターには小型で全長の短いものがありそうなのですが、胴回りが大きいので小型化には向きません。結局、減速機付きのDCモーターの中から選定してみることに。ネットを検索するとありました、AliExpressに6V駆動で200rpmという小型のものを見つけました。回転数もトルクもなんとか使えそうです。シャフトを除いた全長24㎜ですから車輪をつけても片側50㎜以内で収まりそうです。早速2個を注文、2個で送料込で8ドル弱でした。
つぎに、車輪選びです。こちらはタミヤのスリムタイヤセットを選択しました。車輪径が36㎜と55㎜の二種類あります。シャフト径は六角3㎜に対応しているので、モータのシャフト径が3㎜ですので追加工すれば接続出来そうです。
センター出しが肝心ですので慎重に工作します。J3という部品の六角穴側からM3タップをねじ込んでいきます、六角穴がガイドになってセンターが出し易くなります。

(先端が膨らんできています)
反対側に貫通したところで、今度はそのセンター孔を利用して3㎜径のドリルで孔を加工します、これで正確に3㎜孔を追加工できました。出来上がった孔にモーターシャフトを差し込んで完成です。
反対側に貫通したところで、今度はそのセンター孔を利用して3㎜径のドリルで孔を加工します、これで正確に3㎜孔を追加工できました。出来上がった孔にモーターシャフトを差し込んで完成です。

駆動系に目途がついたので三次元CADで構想図を作成していきます。機体幅100㎜でなんとか収まりそうです。
モータを取り付けるベースプレートをCAD図面をもとにアクリル板で製作します。モーターは強力両面テープで接着しました。頼りなげですが、なんとか使えそうです。



全体の回路図です。注意点はUSBとの接続ポートのRESETとマイコンの1番ポートの間に0.1μのコンデンサを追加しないとプログラムを読み込みできなかった。理由はよく解りません。今回の回路特有の問題かもしれません。

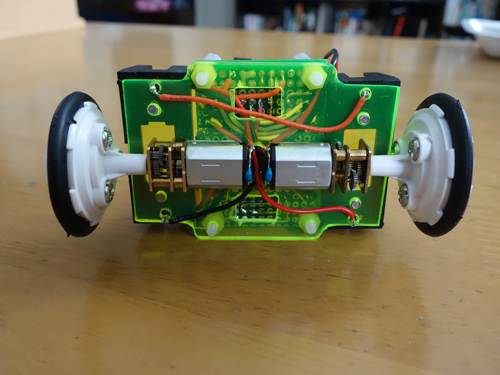
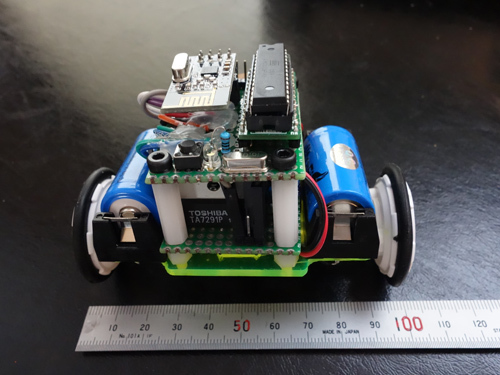
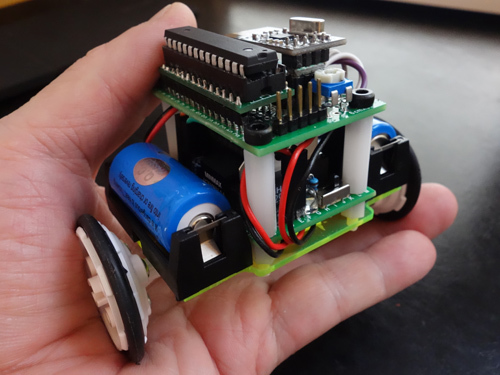
完成した機体です。機体幅100㎜、重量134gでまとまりました。


以前に製作した3号機との比較です。ずいぶん小型軽量化できました。基本的な機能はまったく同じです。

プログラムは3号機のものを流用していますが、各定数は機体に合わせて調整が必要です。まだだチューニングが必要ですが、なんとか倒立姿勢は保てるようになってきました。その模様を動画にしてみました。
さて、後は細かなチューニングとリモコン操作の完成が必要ですが、ほぼ思いどおりのサイズで倒立振子を製作出来る目途ができました。さらなる小型軽量化の改良ポイントととしては、3.7V電池1本で電圧を昇圧してやっても駆動できそうな感じです。そうすれば基板一枚に集約することも可能性がでてきました。
(2015年8月)
(2015年8月)
■
[PR]
by kookymaverick
| 2015-08-13 08:57
| 倒立振子
|
Comments(0)