

2015年 09月 08日
倒立振子 さらなる小型化 その6 機体製作 試運転 |
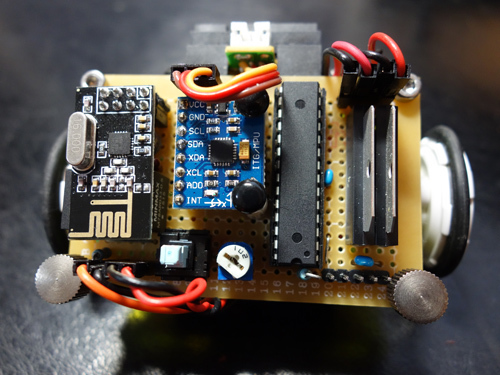
発注していたジャイロセンサーが到着しました、止まっていた試運転にとりかかります。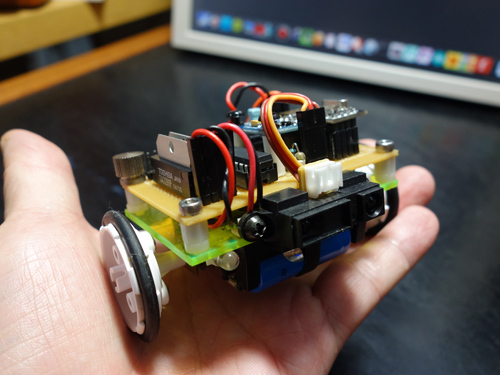
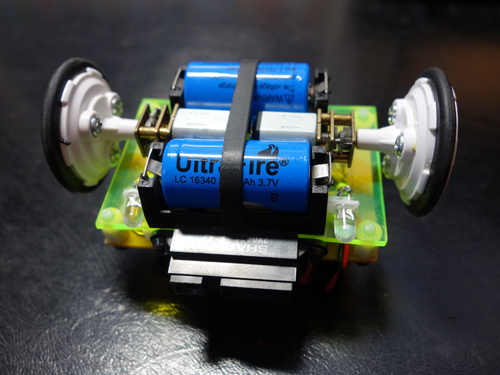



測距センサーは後にしてプログラムは前作を流用しますが、そのままでは前後進がうまくいかないようです。電池を最下部に移動したせいで重心がかなり低いのが原因のようです。速度変化だけでは走り出してくれません。機体を走り出しに傾けるようにプログラムに追加。再度の試運転です、走り出してはくれますが傾いたままでは加速が止まらず直ぐに転倒します。
そこでジョイスティックの動きにあわせて傾きをもとに戻すようにプログラムを修正しました,うまく動いてくれます。後は細かくチューニングをして一応の完成です。
測距センサーは障害物との距離10㎝で機体を後退させてみました、思いがけず機体は後退後、その反動で自然に起き上がってきます。これはこれで面白いです。
気になるのはモーターのトルク不足です、140rpmを選択しましたが、半分以下の回転数でも充分のようです、そうなればトルクは倍以上になるのでこの辺りが次回での課題です。
(2015年9月)
■
[PR]
by kookymaverick
| 2015-09-08 17:03
| ロボット
|
Trackback
|
Comments(0)