

2015年 09月 02日
倒立振子 さらなる小型化 機体製作その3 |
コントロール基板の製作にかかります。使用する基板はサンハヤトのICB-88、47×72mmという基板が今回はピッタリサイズなのでこれを使用します。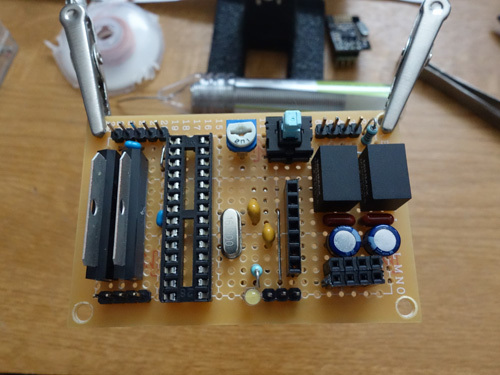
いったん、すべての部品をCAD図面にしたがって仮置きしてみます。

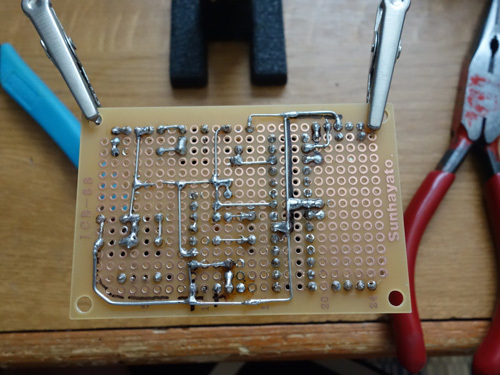
ある程度がCAD図面の段階で配線の段取りは考慮してありますが、もう一度確認していきます。あわてて半田付けをすると後から大変なことになります。確認するのは、私の場合は電源とグランド配線は出来る限り単線で、しかも電源配線を優先したいのでそのように配線できるかを確認していきます。電源とグランド線を半田付け完了しました。後の信号線は被覆線で多少こみいった個所でも配線できる自信はあります。

配線作業のコツは一か所半田付けしたらテスターでその都度導通を確認していくことです。これで完成後の試運転での不具合がかなり少なくなります。今回は5V,3.3Vの回路になりますが、電源回路を完成させてこの部分だけで一旦試験してみます。つぎにマイコン回路を完成して、今回は13ピンにつないだLEDを点滅させてマイコン回路を試験します。つぎにMPU6050,nRF24L1というふうに個別に確認をとっていきます。面倒なようですが、完成後の不具合を検証する手間に較べるとはるかに楽です。

今回もマイコン回路が作動しない不具合発生、原因は今回削除したリセットボタンと同時に10K抵抗も削除してしまったのが原因と判明しました。
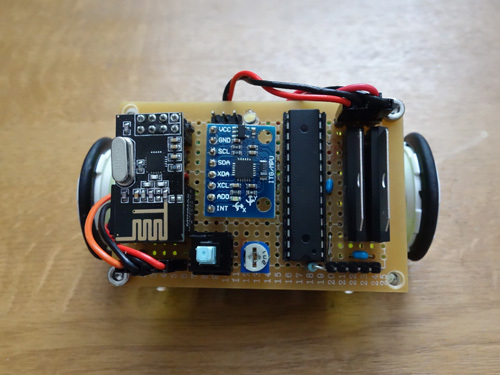
これですべての配線が完了しました。完成した基板を眺めていると、まだまだスペースに余裕がありそうです。頑張ればまだまだ小型化は出来そうですが、モーター周りの寸法をつめなければならないので今後の課題です。
(2015年9月)
■
[PR]
#
by kookymaverick
| 2015-09-02 16:03
| 倒立振子
|
Trackback
|
Comments(0)






