EDIT! – Use XLoader instead of this – it’s just as good and works on more boards.
Hello, a few people have had problems getting their programs uploaded to their arduinos. I haven’t. Not rubbing your faces in it, but if I can’t replicate it, I can’t fix it. I think it might be something to do with bootloaders, but who knows.
EDIT! Looks like it is to do with bootloaders – Matt’s adventures confirm that. I think it’s restricted to UNOs of a certain age. The only UNO I ever owned I blew up literally hours after getting it, so can’t test. And I don’t think this way of uploading will get around the issue – you might just have to reprogram your bootloader.
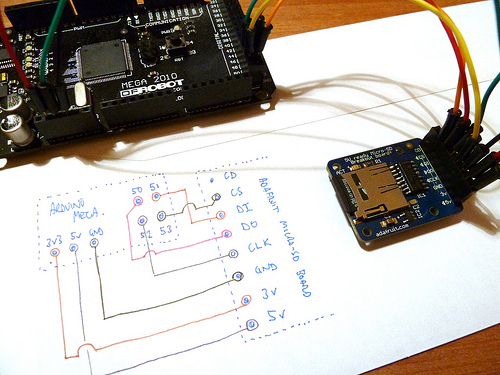
A second problem is that you need a couple of libraries installed, and not everybody want’s to harass themselves with that. So I’ve made a precompiled hex file that you can load onto your arduino to save you that hassle. You don’t even need to have arduino installed anymore.
What you need:
- The hex file is here.
- ARP-Uploader. This is the thing that uploads the hex. Get it from here.
And that’s it. Unzip and startup ARP-Uploader, load up your hex file that you downloaded.

Choose the COM port that your arduino is on, and m328p as the microcontroller.
Change the baud rate from 19200 to 57600 where I’ve highlighted in the pic.
Press upload!
I’d be interested in knowing if this helps anybody who is having sketch size issues too.
OK, this hex file is good for Arduino UNO, Duemilanove, or any ATMEGA328-based arduinos.