

2015年 07月 05日
倒立振子3号機改造 専用基板化 Self Balancing Robot MARK Ⅲ |
さて、完成した専用基板を搭載して緊張の試運転です。細かなところを修正した3号機のスケッチを書き込みます。問題なく書き込みは終了したようです。USBケーブルを切り離して本体のスイッチを入れます、これも問題なくスタート、倒立状態も問題なしです。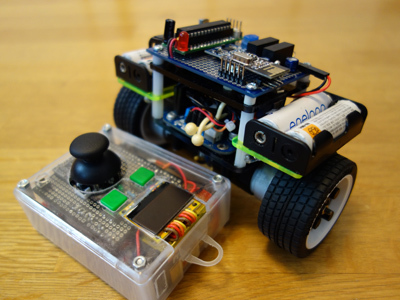
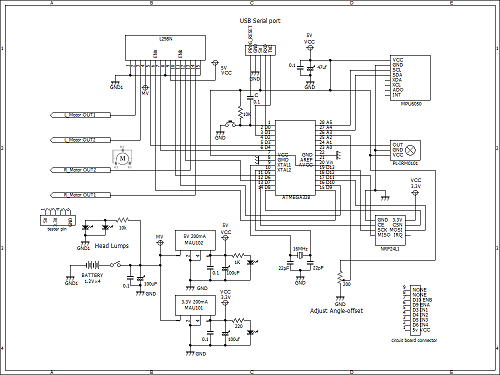
(Schematic circuit diagram of balancing robot Mark 3)


(2015年11月 電源回路訂正)
ジョイスティックコントローラの電源を入れ、運転してみます。まったく問題なく動作します。しばらく、運転してみましたが、何点か以前の3号機とは様子の違う点が見つかりました。
①電源を入れてから本体が運転状態になるまでの時間が極端に短くなりました。
②以前は頻繁におこっていた無線モジュールの動作停止がほぼなくなりました。3.3V電源回路を丁寧に製作した結果でしょう。
③倒立状態も以前よりはさらに安定したようです。以前は時々あった突然転倒することがなくなりました。
運転状態のビデオです、以前掲載した操作画面付きのジョイスティックコントローラはすこぶる操作性良好です。
これで3号機の開発はひとまず終了とします。
振り返ってみれば倒立振子を作り始めて4か月、3号機の初代に取り掛かったのが4月ですので約2か月を要したことになります。
よくここまで来れたものです。ネット上の豊富な情報のおかげと感謝するとともに、やはりネット社会では英語の読解力が重要なことをあらためて痛感。
(2015年7月)
ジョイスティックコントローラの電源を入れ、運転してみます。まったく問題なく動作します。しばらく、運転してみましたが、何点か以前の3号機とは様子の違う点が見つかりました。
①電源を入れてから本体が運転状態になるまでの時間が極端に短くなりました。
②以前は頻繁におこっていた無線モジュールの動作停止がほぼなくなりました。3.3V電源回路を丁寧に製作した結果でしょう。
③倒立状態も以前よりはさらに安定したようです。以前は時々あった突然転倒することがなくなりました。
運転状態のビデオです、以前掲載した操作画面付きのジョイスティックコントローラはすこぶる操作性良好です。
これで3号機の開発はひとまず終了とします。
振り返ってみれば倒立振子を作り始めて4か月、3号機の初代に取り掛かったのが4月ですので約2か月を要したことになります。
よくここまで来れたものです。ネット上の豊富な情報のおかげと感謝するとともに、やはりネット社会では英語の読解力が重要なことをあらためて痛感。
(2015年7月)
■
[PR]
by kookymaverick
| 2015-07-05 17:19
| Arduino
|
Comments(0)