

2015年 05月 13日
Arduino 倒立振子 3号機改 |
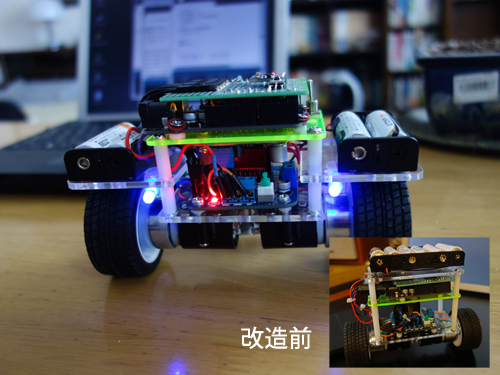
落下事故により破損した3号機の修理と改造が完了。
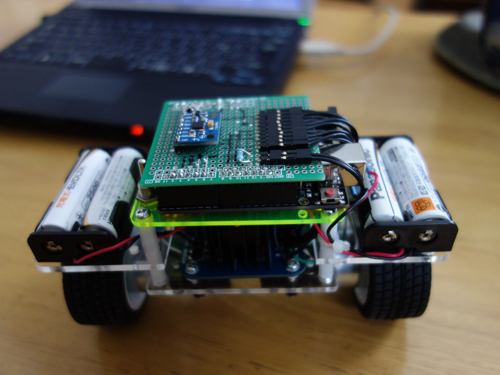
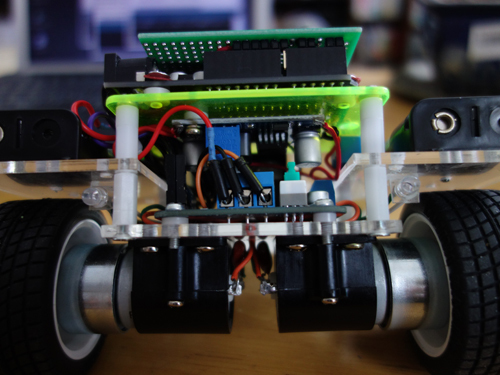
①電源を単三6本を4本に、Arduino電源用に4号機で採用したDC-DCコンバーターを追加。
②電池を左右2本ずつに分けて全体の高さを低く。
③アクセサリーにヘッドライトを追加。
完成した機体です、なかなか精悍な感じに仕上がりました。
さて、操縦のほうですが改造前に比べて旋回がやり易くなったようです。多分、軽量化と低重心化の効果でしょう。
前後進を含めた操縦性はさほど改善の効果は少なく、参考にしている他のブログにあるような軽快な走行状態を得るにはまだまだ改良が必要です。
(2015年5月)
①電源を単三6本を4本に、Arduino電源用に4号機で採用したDC-DCコンバーターを追加。
②電池を左右2本ずつに分けて全体の高さを低く。
③アクセサリーにヘッドライトを追加。
完成した機体です、なかなか精悍な感じに仕上がりました。



さて、操縦のほうですが改造前に比べて旋回がやり易くなったようです。多分、軽量化と低重心化の効果でしょう。
前後進を含めた操縦性はさほど改善の効果は少なく、参考にしている他のブログにあるような軽快な走行状態を得るにはまだまだ改良が必要です。
(2015年5月)
■
[PR]
by kookymaverick
| 2015-05-13 16:25
| Arduino
|
Comments(0)