

2015年 09月 07日
倒立振子 さらなる小型化 機体製作 その5 測距センサーテスト |
部品待ちの間に測距センサーの試験をやっておきます。測距センサーは定番のSHARP製のGP2Y0A2YKを使います。本体に組み付けた様子です。ケーブルはコネクタを使わずに直結してあります。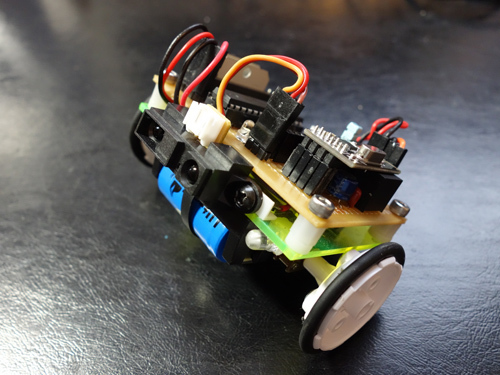

距離計測のプログラムはごく簡単で以下の様なものです。
void setup(){
pinMode(0, OUTPUT);
}
void loop(){
int vout;
int distance;
vout = analogRead(0);
distance = (6762/(vout-9))-4;
}
これを倒立振子プログラムに組み込んで試験のために距離10㎝で車輪が
ストップするようにしてみます。動画のとおりうまく作動しているようです。
これで、リモコン運転中に障害物に近づけば停止するなり、バックするなり、
その場で転倒させることも出来るようになるはずです。
(2015年9月)
■
[PR]
by kookymaverick
| 2015-09-07 11:23
| 倒立振子
|
Trackback
|
Comments(0)