

2015年 03月 06日
Arduino 試運転です!! |
試運転の結果、色々と不具合が見つかりました。クローラーの回転方向の間違いぐらいは可愛いのですが、走行中に距離センサーが変な値を検知してしまいます。結局、センサーの高さが低すぎて地面の反射を拾っているようです。20㎜ほど高くすると改善されました。つぎにクローラーの速度が遅いのです、単三2本で2.8Vぐらいの元電圧ですが、モーター直前で1.8V程度の落ちています。調べてみると使っているモータードライバーTA7291Pの内部降下であることが判明、対策は電池を増やすことしかなさそうなので、当面はこのままにします。
ということで、一応の完成品の姿です。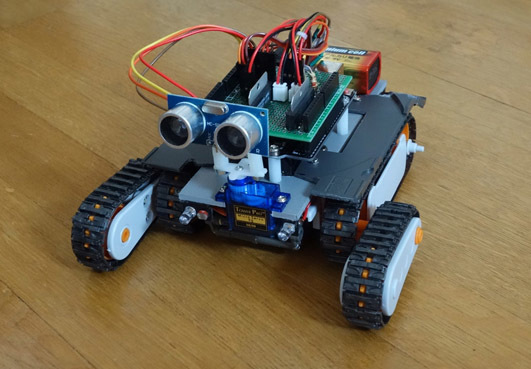
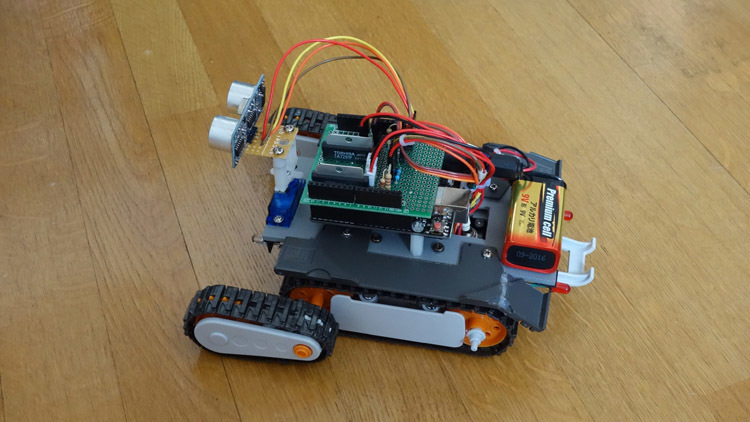
簡単なプログラム(前進、前方探知、障害物発見、一時停止、右旋回ふたたび前進)を組んで、試験走行です。当たり前ですがプログラム通りに走行しています。
一応、ハードに問題はないことが解りましたので、プログラムを工夫して色々な動きをさせてみることにします。
ハードの改善点は。
①速度アップ(電池追加)
②車体カバーをどうするか
ということで、一応の完成品の姿です。


簡単なプログラム(前進、前方探知、障害物発見、一時停止、右旋回ふたたび前進)を組んで、試験走行です。当たり前ですがプログラム通りに走行しています。
一応、ハードに問題はないことが解りましたので、プログラムを工夫して色々な動きをさせてみることにします。
ハードの改善点は。
①速度アップ(電池追加)
②車体カバーをどうするか
■
[PR]
#
by kookymaverick
| 2015-03-06 10:41
| Arduino
|
Comments(0)













