

2015年 05月 10日
Arduino 倒立振子 4号機 改造 |
4号機の電源回路を少し改造してみました。Arduino用に専用電源006P を使っていたのですが、バランスが悪いのでDC-DCコンバーターを使って単三電池4本から昇圧して使うようにしてみました。
コンバーターはNFJというところで380円で販売されているものです。YAHOOショッピングで購入できます。安いですが性能は非常に優れています。4A取り出すことができます。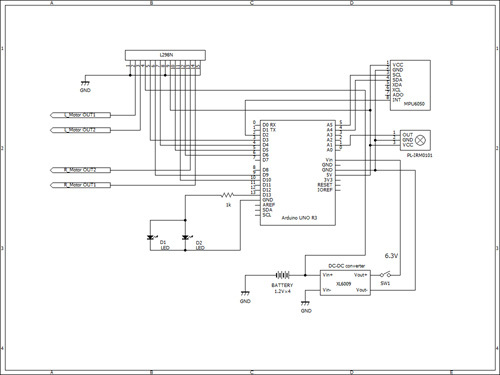

改造結果は良好です。バランスが良くなったうえに、重量が軽くなったせいで倒立安定性、赤外線リモコンでの操縦もやり易くなったようです。
何人かの方からご要望のあった回路図を参考までに公開します。
コンバーターはNFJというところで380円で販売されているものです。YAHOOショッピングで購入できます。安いですが性能は非常に優れています。4A取り出すことができます。


改造結果は良好です。バランスが良くなったうえに、重量が軽くなったせいで倒立安定性、赤外線リモコンでの操縦もやり易くなったようです。
何人かの方からご要望のあった回路図を参考までに公開します。
■
[PR]
#
by kookymaverick
| 2015-05-10 21:40
| 倒立振子
|
Comments(0)



