

2015年 10月 20日
WiFi モジュール |
さて、次の課題はWiFiモジュールです。B-ROBOTではXBeeを使っていますが、価格が三千円前後と手軽には使えないので他を物色しているとESP8266というモジュールがありました。説明文によると「ESP8266はワイヤレス機能をもち、WPAおよびWAP2をサポートします。」とあり価格は500円前後です。これは使ってみようということでESP-01(技適なし),ESP-WROOM-02(技適あり)の2種類を購入しました。

(2015年11月修正)
小型化をキーワードにする製作者としてはESP-01のほうがレイアウトがやり易いのですが、技適のことを考えるとESP-WROOM-02も使いこなしておきたいのです。
到着順に機能確認をしていきます、まずはESP-01からです。
結線方法、使い方はこちらのサイトを参考にさせていただきました。
IPアドレスの取得までは出来ましたので一応成功ということです。
一抹の不安は、試行錯誤しているなかでファームウエアを書き換えたことがあって、最初通信速度115200であったものが9600になってしまいました。ファームウエア的には古いものになってしまった感があります。
ファームウエアの書き換えは結線方法、スケッチとも以下を参考にさせていただきました。
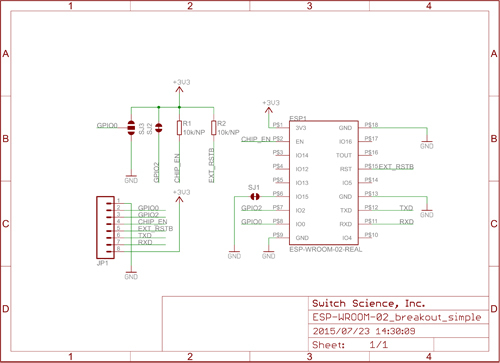
次に、ESP-WROOM-02のほうです。SWITCHSCIENCE社から変換ボードに実装されたシンプル版というものを購入。税込1080円でした。


ARDUINO UNOとの結線は上記サイトどおりとします。これでPCのUSBに接続して、ARDUINOのシリアルモニターにコマンドを打ち込んでやると問題なく作動しました。
なんか拍子抜けです。B-ROBOTの公開されているスケッチを調べてみるとESPはSOFT AP MODEで使うようで"AT+CWMODE=2"という命令文が含まれています。SSIDは”JJROBOT”、PASSWORDは”87654321”ということになっているようです。
この一週間、ESPを勉強してあちらこちらのサイトを読みふけった成果で、当初は意味不明のB-ROBOTスケッチもWiFi関連のところは大分理解できるようになってきました。この記事の最後に私の備忘録として参考にしたサイトを列挙しておきます。
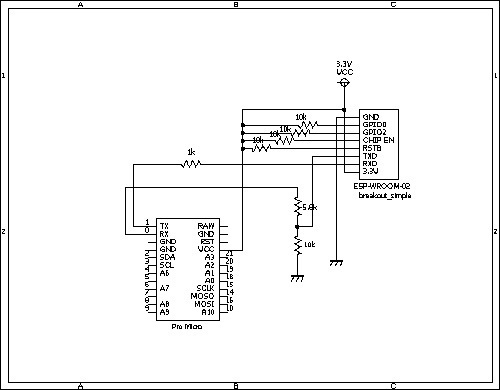
もうひとつ不確かなところは、B-ROBBOTの回路図ではTXからの信号は3.3Vに抵抗分圧、RXは1K抵抗でプルアップしていますが、このようにしている例もサイトにはあり、今回のようにARDUINOのD端子に直結しても動いているので、どちらが正解か迷います。多分どちらでもよいのでしょうが、今回はB-ROBOT回路図どおりにします。ということは6個の抵抗を基板上に配置しなければなりません。ESPモジュールをソケットでかさ上げするつもりなので、その下側にかなりのスペースがとれると思います。
回路図は以下を予定します。

今回は文章ばかりになりましたが、次回はこれも初体験のProMicroマイコンボードの予定です。
ESP8266関連参考サイト;
■
[PR]
▲
by kookymaverick
| 2015-10-20 15:51
| 倒立振子
|
Trackback
|
Comments(0)
















